Download
1 / 17
190 likes | 467 Views
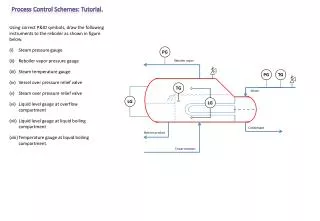
Pressure Control System: Root Locus Plotting. Team Green: X Y Z. Outline. Pressure System Background Previous Work: Transfer Function Root Locus Theory Modeling Results Conclusions. Background: Schematic Diagram. Background: Block Diagram. Manipulated Variable.

E N D
Pressure Control System:Root Locus Plotting Team Green: X Y Z
Outline • Pressure System Background • Previous Work: Transfer Function • Root Locus Theory • Modeling • Results • Conclusions
Background: Block Diagram Manipulated Variable Controlled Variable M System C % Motor Speed Pressure in cm-H2O
Background: SSOC Output: 1.3 –3.8 cm H2O Operating Range: 30 – 70%
K = 0.061 cm of H2O / % to = 0.25 sec t = 0.4 sec Background: FOPDT Parameters
Where z is the damping ratio. Decay Ratio = Root Locus Theory
³ 1 < z < 1 = 0 -1 < z < 0 z £ -1 Overdamped = monotonic and stable Underdamped = oscillatory and stable Undamped = sustained oscillations Unstable = growing oscillations Run-away = monotonic and unstable Effects of z
Root Locus Parameters • KCD = highest value of KC that provides monotonic and stable output (critically damped) • KQD = value of KC that produces one- quarter oscillating decay • KCU = highest value of KC that causes oscillatory and stable output (marginally stable)
Root Locus Parameters • KCD is found where the roots go from real to complex • KQD is found where the ratio of the imaginary root to the real root is 4.5 • KCU is found where the real portion of the root goes from negative to positive.
Parameter Locations Dr Henry’s Suggestion: Put the VALUES of the Kc’s for the different choices you have on this graph KQD KCU KCD
Results from Root Locus • Ultimate Kcu= 37 • Quarter Decay Kc = 24. • Critically Damping Kc = 0.1 • Underdamped 0.1< Kc < 37 • Overdamped 0 < Kc < 0.1 *all units are % / cm H2O
Conclusions ForKc needed Overdamped 0 < Kc < 0.1 Critically Damped Kc = 0.1 Underdamped 0.1< Kc < 36.9 Quarter Decay Kc = 24.2 *all units are % / cm H2O