Download
1 / 28
290 likes | 375 Views
LSM. Theory: Overdetermined vs Underdetermined. Workflow: Diffraction Stack vs RTM. Sensitivity: LSM sensitivity to D v ( x,z ). Dot Product Test: ( Lm,d )=( m,L T d). Examples. Summary. Iterative Least Squares Migration. Step 1:. Step 2:. Step 3:. Step 4:. Motivation LSM.

E N D
LSM Theory: Overdeterminedvs Underdetermined Workflow: Diffraction Stack vs RTM Sensitivity: LSM sensitivity to Dv(x,z) Dot Product Test: (Lm,d)=(m,LTd) Examples Summary
Iterative Least Squares Migration Step 1: Step 2: Step 3: Step 4:
Iterative Least Squares Migration Overdetermined Liability: wrong velocity model smears reflectivity Migration image Wrong v(x,z) will misposition reflector for src on left vssrc on right. Inconsistent Set of equations so reflector will be blurred rthatexpalins all CSGs
Iterative Least Squares Migration Underdetermined Advantage: correct migration images prior to stacking Misfit+regularization i Invert each shot gather separately Penalize CSG images if they are different
LSM Theory: Overdeterminedvs Underdetermined Workflow: Diffraction Stack vs RTM Sensitivity: LSM sensitivity to Dv(x,z) Dot Product Test: (Lm,d)=(m,LTd) Examples Summary
Unlike RTM, Kirchhoff not bothered by rabbit ears MATLAB SD Least Squares Diffraction Stack Migration Note: no update to smooth background c, only hi-wavenumber m p=p0 % Data without direct wave m=adjoint(p,c) % Initial reflectivity model c % Velocity model for i=1:niter p=forward(m,c) % Kirchhoff predicted data alpha=step(p,p0,c,m) % step length dP=p-p0 % data residual dm =adjoint(dP,c) % migrate residual m = m –alpha*dm% Update model end - =
Iterative Least Squares Migration We are now using RTM so Both rabbit ears+ellipses - Note: no update to smooth background so, only hi-wavenumber ds LD D U
LSM Theory: Overdeterminedvs Underdetermined Workflow: Diffraction Stack vs RTM Sensitivity: LSM sensitivity to Dv(x,z) Dot Product Test: (Lm,d)=(m,LTd) Examples Summary
LSM Theory: Overdeterminedvs Underdetermined Workflow: Diffraction Stack vs RTM Sensitivity: LSM sensitivity to Dv(x,z) Dot Product Test: (Lm,d)=(m,LTd) Examples Summary
Actual model Predicted model Predicted data Actual data T T T d Lm =(d,Lm) = (Lm,d) = m L d Dot Product Test with CG code d=forward(m,c) m=adjoint(d,c) d d = T m T m All migration codes should pass the dot product test
LSM Theory: Overdeterminedvs Underdetermined Workflow: Diffraction Stack vs RTM Sensitivity: LSM sensitivity to Dv(x,z) Dot Product Test: (Lm,d)=(m,LTd) Examples Summary
2D Poststack Data from Japan Sea JAPEX 2D SSP marine data description: Acquired in 1974, Dominant frequency of 15 Hz. 0 TWT (s) 5 0 20 X (km)
Poststack LSM vs. Kirchhoff Migration LSM Image Kirchhoff Migration Image 0.7 0.7 Depth (km) Depth (km) 1.9 1.9 4.9 4.9 2.4 2.4 X (km) X (km)
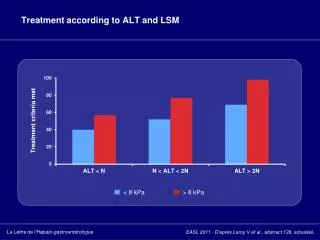
Multi-scale LSM Applied to JAPEX Data Multi-scale (MS) LSM vs. Standard LSM Convergence Curves X10 5 MS LSM Image Standard LSM Image Multi-scale LSM 3.0 0.7 0.7 Standard LSM 20Hz Residual Depth (km) 25 30 32 34 36 38 40 0.5 1.9 1.9 0 40 2.4 4.9 Iteration 2.4 4.9 X (km) X (km)
GOM Poststack Data Poststack LSM somewhat insensitive to Dv(x,z)
Prestack KM vs LSM Prestack LSM sensitive to Dv(x,z)
NL Means Filter for Trim Statics Problem: velocity error CIGs misaligned poor stacking Washed out 1 A Two prestack image patches out of phase: shift 2 1 B Solution: Xcorr patches; recursive stacking needs no pilot 1 2 3 4 C
NL Means Filter for Trim Statics Advantage: drastic improvement in feature coherency Disadvantage: strong migration artifacts may mislead Examples: Simple Stacking Future Work: 3D trim statics Trim Statics
LSM Summary 1. Prefer undetermined LSM if large Dv(xz)>>0 2. Biggest challenge: LSM sensitive Dv(x,z) 3. Q-LSM much better than LSM or RTM if Q<30 4. LSRTM cost O(20x) more than RTM 5. Multisource encoded O(LSRTM) cost = O(RTM) 6. Iterative LSM+DSO+FWI is future.