Download
1 / 22
230 likes | 520 Views
Microrobotic Actuation Mechanisms. Srinivas K. Prasad, MD Johns Hopkins University. Seminar Presentation February 22, 2001. Traditional Surgical Technique. Surgical technique has historically required the establishment of a wide “cone of light” created over a target workspace.

E N D
Microrobotic Actuation Mechanisms Srinivas K. Prasad, MD Johns Hopkins University Seminar Presentation February 22, 2001
Traditional Surgical Technique • Surgical technique has historically required the establishment of a wide “cone of light” created over a target workspace. • Large incisions and substantial tissue dissection became the rule for these procedures. • Patient Morbidity and Mortality was minimized by invoking Listerian principles of Anti-Sepsis and Halsted’s principles of gentle tissue manipulation
Minimally Invasive Surgery • Extrapolation of Halstedian principles prompted the investigation of surgical alternatives to the traditional “cone of light” • Advances in Radiology and Fiberoptics Technology have been coupled with simple instrument redesign to enable surgeons to minimize the traumatic extent of exposure and dissection. • The Broad Success of Minimally Invasive Surgical techniques has prompted the redesign of several surgical procedures in a variety of disciplines.
Challenges for MIS • Full realization of the MIS vision requires substantial surgical instrument redesign. • Traditional instrument redesigns have compromised dexterity and tactile feedback, requiring surgeons to operate within these constraints • Harnessing the power of advances in microrobotic and haptic technologies promises to allow surgeons of the future to extend the benefits of Minimally Invasive Surgery to patients across a broader spectrum of disease.
Research Articles • Primary Article: Survey of Microrobotic syntax, design and available technologies. Dario, P, et al., “Microactuators for Microrobots: A Critical Survey,” Journal of Micromechanics and Microengineering, Sept 1992, pp. 141-157. • Secondary Articles: Monkman, G., “Micro Actuation and Memory Alloys,” Assembly Automation, vol. 16, no. 4, 1996, pp. 22-25. Suzumori, K, et al., “Applying a Flexible Microactuator to Robotic Mechanisms,” IEEE International Conference on Robotics and Automation, 1991, pp. 21-27. Hashimoto, M, et al., “Application of Shape Memory Alloy to Robotic Actuators,” Journal of Robotic Systems, vol. 2, no. 1, 1985, pp. 3-25.
Syntax Microdevices: Micromachine vs. Microrobot • Micromachine: “A device capable of generating or modulating mechanical work, without necessarily possessing any onboard control”, e.g. micromotor, microvalve or a collection of these devices in a complex, but passive, system. • Microrobot: “A device with some form of reprogrammable behavior, or some degree of adaptivity to unpredictable circumstances or remote controllability.
SyntaxScale Considerations • Miniature robot: • Size & Workspace: few cubic centimeters. • Forces: comparable to those applied by human operators during fine manipulation. • Interaction: Mechanical • Fabrication: Conventional techniques for fabrication of components scaled down to miniature level. • Microrobot: • Size & Workspace: few cubic micrometers • Forces: much smaller for tasks like manipulation of cells and nanorobots • Interaction: Mechanical, Electromagnetic Field, Chemical • Fabrication: ‘Modified Chip’ design utilizing silicon micromachining technologies for fabrication of micromotors, sensors and processing circuitry. • Nanorobot: • Size & Workspace: few hundred nanometers • Forces: Infinitesimal • Interaction: Principally Chemical • Fabrication: Nanoscale fabrication techniques for development of molecular mechanical components; Polymer chemistry techniques • We will collectively refer to these as Microrobots.
Microrobot Configurations • Microrobot Components: • Physical Structure • Controller Unit (CU) • Power Source (PS) • Actuators for positioning(Ap) • Actuators for Operation (Ao) • Sensors • Microrobot Mobility: • Note that the microrobots can be either fixed or mobile
Design Considerations • These follow from the components and configurations outlined on the previous slide: • Degree of autonomy • Control Mechanisms • Energy Sources • Actuation Mechanisms • Positioning sensor requirements • Haptic Feedback requirements
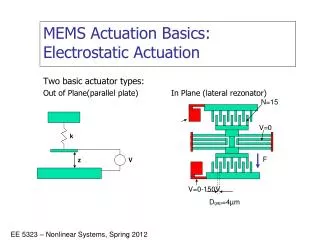
General Microactuation Considerations • Electromagnetic Motors • exhibit significant limitations when miniaturized as a consequence of decreased magnetic flux density • Require reduction gears to generate useful torques, but these are difficult to fabricate and couple at this scale and they have limited reliability. • Microactuation Alternatives • Electrostatic Motors • Shape Memory Alloy Mechanisms • Piezoelectric Mechanisms • Rubber Microactuators
Electrostatic Actuators • While Electromagnetic Motors are the flagship actuators of macrorobots, Electrostatic Motors have a number of advantages in a microrobotic context: • Easily fabricated on silicon wafers • High electric fields can be achieved using sub-micron air gaps • High rotation speeds can be achieved • Control Circuitry can be built onto the same chip • Electrostatic force scales down very favorably • Can be batch fabricated and coupled on the same chip
Shape Memory Alloy • SMA is a device that converts thermal energy into Kinetic Energy as a fundamental property of the alloy, e.g. TiNi • In particular, these alloys are capable of regaining, either fully or partially, a previous conformation when heated above a characteristic ‘transition temperature’. This is called the Shape Memory Effect. • SME is a ‘thermoelastic transformation’ from a ‘martensitic phase’ at low temperature to a ‘austenitic phase’ at high temperature.
Properties of SMA • Advantages: • SMA’s are very compact, allowing for reduction in overall actuator size. • Very high power/weight ratio comparatively • Can provide both structural integrity and actuation mechanisms, reducing complexity • Accessible voltages can accomplish thermoelastic transformation • Electrical Resistance difference between two states can be used as a sensing element to monitor actuator position and force.
Properties of SMA • Disadvantages: • Very poor efficiency; Theoretical efficiency ceiling is 10% (Carnot Cycle calculation) but practical efficiency seldom exceeds 1%. • Need Mechanism for cooling SMA • Regained Conformation with cooling is less predictable
Piezoelectric Mechanisms • Piezoelectric devices are based on conversion of electrical energy into mechanical energy through the piezoelectric effect. • Ceramics come in a variety of shapes and configurations. • Good for generating displacements but of limited utility for exerting operative level forces as a consequence of low work energy density
Rubber Microactuators • Driven by Electropneumatic or electrohydraulic systems. • Easy to miniaturize • Many degrees of freedom based on design • High power density • Smooth behavior
Conclusion • The frontiers of Minimally Invasive Surgery are rich with possibility as we approach the problem of microrobotic instrumentation from many directions. • It is clear that there are many actuation options worthy of investigation and we hope to explore the SMA domain to develop one novel solution in the treatment of Pelvic Osteolysis.