Download
1 / 28
290 likes | 612 Views
Subdivision of Edge. In a graph G, subdivision of an edge uv is the operation of replacing uv with a path u,w,v through a new vertex w. Subdivision of Graph. An H-subdivision (or subdivision of H) is a graph obtained from a graph H by successive edge subdivisions. G. G. convex polygon.

E N D
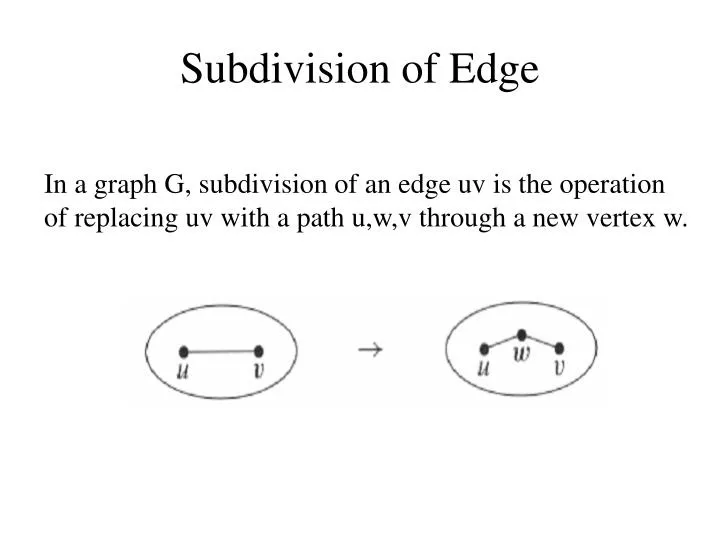
Subdivision of Edge In a graph G, subdivision of an edge uv is the operation of replacing uv with a path u,w,v through a new vertex w.
Subdivision of Graph An H-subdivision (or subdivision of H) is a graph obtained from a graph H by successive edge subdivisions.
G G convex polygon non-convex polygon Kuratowski Subgraph Kuratowski subgraph of G: a subgraph of G that is a subdivision of K5 or K3,3. Minimal nonplanar graph: a nonplanar graph such that every proper subgraph is planar. Convex embedding of a graph:a planar embedding in which each face boundary is convex polygon.
Kuratowski’s Theorem (if) • A graph G is nonplanar if G has a Kuratowski subgraph. Proof. Suppose G is planar. Each subgraph of G is planar. Subdivision of K5 or K3,3 is planar. K5 or K3,3 is planar. It’s a contradiction. Subgraph of G G
Kuratowski’s Theorem (only if) Lemma 6.2.7: If G is a graph with fewest edges among all nonplanar graphs without Kuratowski subgraphs, then G is 3-connected. Theorem 6.2.11: If G is a 3-connected graph without Kuratowski subgraphs, then G has a convex embedding in the plane with no three vertices on a line. This implies no nonplanar graph without Kuratowski subgraph exists. That is, A graph G is nonplanar only if G has a Kuratowski subgraph.
F = {a , b , c} F = {a , b , c} a a c c b b G G Lemma 6.2.4 If F is the edge set of a face in a planar embedding of G, then G has an embedding with F being the edge set of the unbounded face.
S-lobe Let S be a set of vertices in a graph G. An S-lobe of G is an induced subgraph of G whose vertex set consists of S and the vertices of a component of G – S.
Lemma 6.2.5 Every minimal non-planar graph is 2-connected. Proof. 1. Let G be a minimal non-planar graph. 2. We need to show the following two cases are impossible: (1) G is disconnected. (2) G is 1-connected.
one face of C1 C2 C3 C1 G Lemma 6.2.5 3. Case 1: G is disconnected. 4. Let G1, G2, …, Gk be the components of G. 5. G1, G2, …, Gk are planar since G is minimal non-planar graph. 6. We can embed one component of G inside one face of an embedding of the rest. 7. It implies G is a planar graph. It’s a contradiction.
G1 G4 G2 v 90。 G3 G Lemma 6.2.5 8. Case 2: G has a cut-vertex v. 9. Let G1, G2, …, Gk be the {v}-lobes of G. 10. G1, G2, …, Gk are planar since G is minimal non-planar graph. 11. We can embed each Gi with v on the outside face. 12. We squeeze each embedding to fit in an angle smaller than 360/k degrees at v. 13. It implies G is a planar graph. It’s a contradiction.
Lemma 6.2.6 Let S = {x, y} be a separating 2-set of G. If G is nonplanar, then adding the edge xy to some S-lobe of G yields a nonplanar graph. 1. Let G1,…, Gk be the S-lobes of G, and let Hi=Gi∪xy. 2. Suppose that each Hi is planar. 3. Each Hi has an embedding with xy on the outside face.
x x x H1 H1 H1 H3 H1=G1 edge xy H2 H2 H2 H3 S-lobe G1 G1 G2 G2 G1 G2 G3 G1 G3 y y y y Lemma 6.2.6 4.For each i >1, Hi can be attached to an embedding of by embedding Hi in a face that has xy on its boundary. 5. Deleting edge xy if it is not in G yields a planar embedding of G. 6. It’s a contradiction. x x x H1 H2 H1 H2 H3 G1 G2 G2 G1 G3 y y
Lemma 6.2.7 If G is a graph with fewest edges among all nonplanar graphs without Kuratowski subgraphs, then G is 3-connected. 1. Deleting an edge of G cannot create a Kuratowski subgraphs in G. 2. It implies that deleting one edge produces a planar subgraph. 3. Therefore, G is a minimal nonplanar graph.
Lemma 6.2.7 4. G is 2-connected by Lemma 6.2.5. 5. Suppose that G has a separating 2-set S = {x, y}. 6. Since G is nonplanar, the union of xy with some S-lobe, H, is nonplanar by Lemma 6.2.6. 7. Since H has fewer edges than G, the minimality of G forces H to have a Kuratowski subgraph F.
Lemma 6.2.7 8. All of F appears in G except possibly the edge xy. 9. Since S is a minimal vertex cut, both x and y have neighbors in every S-lobe. 10. we can replace xy in F with an x, y-path through another S-lobe to obtain a Kuratowski subgraph of G. It is a contradiction.
Lemma 6.2.9 Every 3-connected graph G with at least five vertices has an edge e such that G.e is 3-connected. Proof: 1. We use contradiction and extremality. 2. Consider an edge e with endpoints x, y. 3. If G.e is not 3-connected, it has a separating 2-set S. 4. Since G is 3-connected, S must include the vertex obtained by shrinking e. 5. Let z denote the other vertex of S and call it the mate of the adjacent pair x, y. 6. {x, y, z} is a separating 3-set in G.
Lemma 6.2.9 7. Suppose that G has no edges whose contraction yields a 3-connected graph, so every adjacent pair has a mate. 8. Among all the edges of G, choose e = xy and their mate z so that the resulting disconnected graph G – {x, y, z} has a component H with the largest order. 9. Let H’ be another component of G – {x, y, z}. 10. Since {x, y, z} is a minimal separating set, each of x, y, z has a neighbor in each of H, H’. 11. Let u be a neighbor of z in H’, and let v be the mate of u, z.
Lemma 6.2.9 • G – {z, u, v} is disconnected. • 13. The subgraph of G induced by V(H) U {x ,y} is connected. Deleting v from this subgraph, if it occurs there, cannot disconnect it, since then G – {z, v} would be disconnected. • 14. GV(H) {x ,y} – v is contained in a component of G – {z, u, v} that has more vertices than H, which contradicts the choice of x, y, z.
Branch Vertices The branch vertices in a subdivision H’ of H are the vertices of degree at least 3 in H’.
Lemma 6.2.10 If G has no Kuratowski subgraph, then also G.e has no Kuratowski subgraph. Proof: 1. We prove the contrapositive. 2. If G . e contains a Kuratowski subgraph H, so does G. 3. Let z be the vertex of G.e obtained by contracting e = xy. 4. If z is not in H, H itself is a Kuratowski subgraph of G. 5. If z V(H) but z is not a branch vertex of H, we obtain a Kuratowski subgraph of G from H by replacing z with x or y or with the edge xy.
Lemma 6.2.10 6. If z is a branch vertex in H and at most one edge incident to z in H is incident to x in G, then expanding z into xy lengthens that path, and y is the corresponding branch vertex for a Kuratowski subgraph in G. 7. In the remaining case, H is a subdivision of K5 and z is a branch vertex, and the four edges incident to z in H consist of two incident to x and two incident to y in G.
Theorem 6.2.11 If G is a 3-connected graph without Kuratowski subgraphs, G has a convex embedding in the plane with no three vertices on a line. Proof: 1. We use induction on n(G). 2. Basis step: n(G) ≤ 4. The only 3-connected graph with at most four vertices is K4, which has such an embedding. 3. Induction step: n(G) ≥ 5. There exists an edge e such that G.e is 3-connectedby Lemma 6.2.9. 4. Let z be the vertex obtained by contracting e. 5. By Lemma 6.2.10, G.e has no Kuratowski subgraph. 6. By the induction hypothesis, we obtain a convex embedding of H = G.e with no three vertices on a line.
Theorem 6.2.11 7. In this embedding, the subgraph obtained by deleting the edges incident to z has a face containing z. (perhaps unbounded) 8. Since H – z is 2-connected, the boundary of this face is a cycle C. 9. All neighbors of z lie on C; they may be neighbors in G of x or y or both, where x and y are the original endpoints of e. 10. The convex embedding of H includes straight segments from z to all its neighbors. Let x1, …, xk be the neighbors of x in cycle order on C.
Theorem 6.2.11 11. If all neighbors of y lie in the portion of C from xi to xi+1, then we obtain a convex embedding of G by putting x at z in H and putting y at a point close to z in the wedge formed by xxi and xxi+1, as show in the diagrams for Case 0.
Theorem 6.2.11 12. If this does not occur, then either 1) y shares three neighbors u, v, w with x,or 2) y has neighbors u, v that alternate on C with neighbors xi, xi+1 of x.
Theorem 6.2.11 13. In Case 1, C together with xy and the edges from {x, y} to {u, v, x} form a subdivision of K5. 14. In case 2, C together with the paths uyv, xixxi+1, and xy form a subdivision of K3,3. 15. Since we are considering only graphs without Kuratowski subgraph, in fact Case 0 must occur.
Theorem 6.2.11 Why do we need to put y at a point close to z in argument 11? z Xi+1 x Xi+1 xi xi b a, b are neighbors of y b y a a
Theorem 6.2.11 Why do we not show G has a convex embedding in the plane but to show G has a convex embedding in the plane with no three vertices on a line? Xi+1 b Xi+1 b xi xi z x a, b are neighbors of y y a a