Download
1 / 21
210 likes | 381 Views
1. RESPOSTA DE UM SISTEMA. SISTEMA. RESPOSTA TOTAL = Resposta Transitória + Resposta em Estado Estacionário. SISTEMAS II. 2. DESEMPENHO DINÂMICO. ERRO ESTACIONÁRIO: somente um dos coeficientes assume um valor finito para um dado sistema os demais ou são nulos ou são infinitos.

E N D
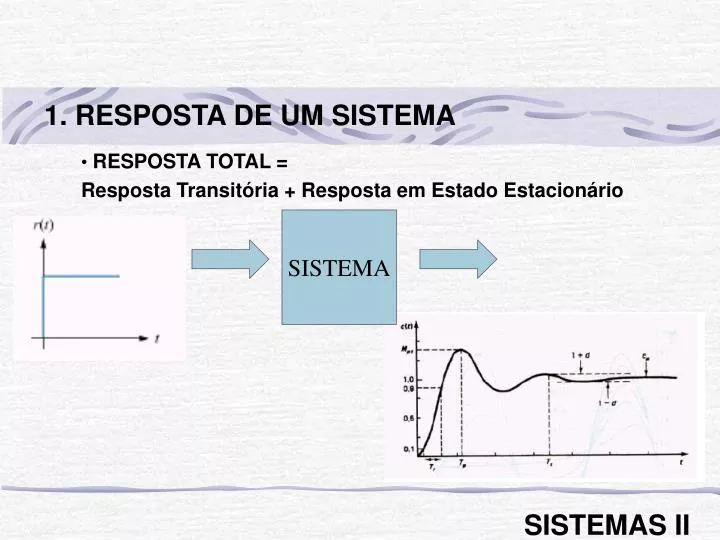
1. RESPOSTA DE UM SISTEMA SISTEMA RESPOSTA TOTAL = Resposta Transitória + Resposta em Estado Estacionário SISTEMAS II
2. DESEMPENHO DINÂMICO ERRO ESTACIONÁRIO: somente um dos coeficientes assume um valor finito para um dado sistema os demais ou são nulos ou são infinitos. VARIAÇÃO DO ERRO COM O TEMPO: esta informação é provida com os coeficientes de erro dinâmico. SISTEMAS DIFERENTES: podem apresentar coeficientes de erro estacionário iguais, mas diferentes coeficientes de erro dinâmico. DESEMPENHO DINÂMICO: mostra o comportamento em regime transitório de um sistema. SISTEMAS II
3.1. RESPOSTA NO TEMPO RESPOSTA AO DEGRAU UNITÁRIO DE UM SISTEMA DE 2a. ORDEM: 1) Não - amortecido 2) Subamortecido 3) Criticamente amortecido 4) Superamortecido SISTEMAS II
3.2. RESPOSTA NO TEMPO RESPOSTA AO DEGRAU UNITÁRIO DE UM SISTEMA DE 2a. ORDEM: a) 2 pólos reais diferentes b) par complexo conjugado c) par complexo conjugado sobre o eixo jw d) 2 pólos reais iguais SISTEMAS II
4.1. PAR COMPLEXO DOMINANTE TENDÊNCIA DOS PROCESSOS FÍSICOS: ter um no. maior de pólos do que de zeros na F.T. que o representa sistemas causais. PROBLEMA BÁSICO DE CONTROLE: > ganho < erro, mas com > ganho os pólos tendem a migrar para o SPD (Root Locus). PAR DE PÓLOS COMPLEXOS DOMINANTES: o objetivo é colocar um par de pólos complexos dominantes, que venham a caracterizar o desempenho do sistema. SISTEMA DE 2a. ORDEM: par complexo dominante = + jd SISTEMAS II
4.2. PAR COMPLEXO DOMINANTE SISTEMA APROXIMADO COMO DE 2a. ORDEM PELA EXISTÊNCIA DE UM PAR DE PÓLOS COMPLEXOS DOMINANTES = + jd SISTEMAS II
4.3. PAR COMPLEXO DOMINANTE FTMF(s) = T(s) = C(s) / R(s) = G(s) / [1 + G(s) . 1] H(s) = 1 T(s) = wn2 / [(s+)2 + wd2] = wn2 / [s2 + 2..wn.s + wn2] T(s) = wn2 / [(s + .wn)2 + (wn.(1 - 2))] T(s) = wn2 / [(s + .wn + jwn.(1 - 2)) (s + .wn - jwn.(1 - 2)) Onde: = .wn = amortecimento real = coeficiente de amortecimento wn = wo = freqüência natural wd = wn.(1 - 2) = freqüência real ou amortecida SISTEMAS II
4.4. PAR COMPLEXO DOMINANTE cos = (0 < > 1) > 1 sistema hiperamortecido raízes reais = 1 sistema criticamente amortecido raízes reais e iguais < 1 sistema hipoamortecido raízes complexas conjugadas = 0 sistema não-amortecido raízes imaginárias SISTEMAS II
4.5. PAR COMPLEXO DOMINANTE RESPOSTA AO DEGRAU UNITÁRIO: T(s) = C(s) / R(s) = wn2 / [s2 + 2..wn.s + wn2] Se R(s) = 1 /s R(s).T(s) = C(s) = wn2 / [s(s2 + 2..wn.s + wn2)] Assim: c(t) = 1 - [(1 / (1 - 2)) . exp (- wnt). sen(wn.(1 - 2)t + )] exp = no. e = 2,71828... SISTEMAS II
5. MEDIDAS DE DESEMPENHO MEDIDAS DE DESEMPENHO PARA SISTEMAS DE 2a. ORDEM: tr = tempo de subida tp = tempo de pico Mo = overshoot ts = tempo de estabilização SISTEMAS II
6. TEMPO DE SUBIDA (tr) CONCEITO: tempo gasto para a resposta aumentar de 10 a 90% do valor de regime permanente. tr nos dá uma medida da velocidade de resposta de um sistema ao degrau. w.tr = 1/2 . é o tempo que a resposta oscilatória gasta para completar 1/4 de ciclo = / 2 tr = ( - ) / [wn.(1 - 2)] quanto > o valor de > o tr SISTEMAS II
7. TEMPO DE PICO (tp) CONCEITO: tempo gasto para a resposta aumentar de 0 ao primeiro valor de pico. Esse é o tempo para a resposta oscilatória completar 1/2 ciclo = w.tp = tp = / wd = / [wn.(1 - 2)] é o primeiro ponto de máximo pico Em tp a resposta do sistema é: c(tp) = Mp = 1 + exp( - / (1 - 2)) exp = no. e = 2,71828... SISTEMAS II
8. OVERSHOOT OU SOBRE-SINAL (Mo) CONCEITO: é a quantidade percentual máxima em que a resposta ultrapassa o valor de regime permanente. Mo [%] = 100. exp( - / (1 - 2)) = 100. exp( - Re / Im) onde: exp = no. e = 2,71828... Do ponto de vista de Mo, se Re Im (parte real parte imaginária) teremos um Overshoot de 5 a 6%. Pode-se obter desta expressão: = - ln Mo / [( 2 + (ln Mo)2)] SISTEMAS II
9. TEMPO DE ESTABILIZAÇÃO (ts) CONCEITO: é o tempo gasto para a resposta diminuir e permanecer dentro de algum percentual especificado. É usado como uma medida do tempo gasto para que as oscilações desapareceçam. ts = n / = n / (.wn) onde n = número de constantes de tempo n = 1 exp(-n) = 0,368 faltam 36,8% para atingir RP n = 2 exp(-n) = 0,135 faltam 13,5% para atingir RP n = 3 exp(-n) = 0,05 faltam 5% para atingir RP n = 4 exp(-n) = 0,018 faltam 1,8% para atingir RP n = 5 exp(-n) = 0,007 faltam 0,7% para atingir RP SISTEMAS II
10. ANÁLISE DO PAR COMPLEXO DOMINANTE São considerados pólos dominantes o par de pólos complexos p1, p2, se: 1) |Re (p)| > |5.(.wn)| → caso de pólo real à esquerda do par dominante 2) |Re (z)| > |5.(.wn)| → caso de zero real à esquerda do par dominante O par complexo dominante deve atender as especificações de projeto → deve ser delimitada uma região no plano complexo. SISTEMAS II
11. REGIÃO QUE ATENDE ESPECIFICAÇÕES O par complexo dominante deve atender as especificações: Mo, ts. O par complexo deve ser dominante sobre os demais. Mo → depende de (0 < > 1) → que por sua vez depende de cos = ts → depende da parte real do par dominante → = .wn SISTEMAS II
12.1. APLICAÇÃO A SISTEMAS TIPO 0 FTMF(s) = T(s) = K (s-z1)(s-z2)...(s-zm) / [(s-p1)(s-p2)...(s-pn)] tp = 1 / wd [ (/2) + ∑p - ∑z ] onde: Wd = parte imaginária do pólo dominante p1 ∑p = somatório das contribuições angulares ao pólo p1 de todos os pólos, incluindo seu conjugado ∑z = somatório das contribuições angulares ao pólo p1 de todos os zeros SISTEMAS II
12.2. APLICAÇÃO A SISTEMAS TIPO 0 Mp = [C(0) / R(0)] + Mo Mo = (2.wd / wn2) |K.Пim (p1 – zi) / Пjn (p1 – pj)|.exp(- .tp) onde: [C(0) / R(0)] = valor final de T(t) Пim = produtório de (i=1) até (i=m) Пjn = produtório de (j=1) até (j=n) exp = no. e = 2,71828... = parte real = .wn SISTEMAS II
13. APLICAÇÃO A SISTEMAS TIPO 1, 2, 3… Mo [%] = {[(A).(B)] / [(C).(D)]} . exp(- .tp) . 100 onde: A = П |p 0,0| = produto das distâncias de todos os pólos à origem, excluídos p1 e p2 (par complexo dominante) B = П |z p1| = produto das distâncias de todos os zeros ao pólo p1 C = П |z 0,0| = produto das distâncias de todos os zeros à origem D = П |p p1| = produto das distâncias de todos os pólos ao pólo p1, excluído (2.wd), que é a distância entre os conjugados p1 e p2 exp = no. e = 2,71828... = parte real = .wn SISTEMAS II
14.1. ANÁLISE DO MODO LENTO Ao introduzirmos compensadores em série com sistemas, onde queremos adequar as características da função de transferência em malha fechada às especificações mínimas de projeto, locamos pares pólo-zero na malha aberta que originam modos lentos na resposta transitória da FTMF, por se situarem próximos ao eixo jw, distantes dos demais, mas de valores próximos um do outro. Avaliação do Modo Lento → deve ser realizado em T(s) = FTMF(s) Aproximação → ML = (∑Tz - ∑Tp) / ∑Tp = (∑p - ∑z) / ∑z Onde: (∑Tz - ∑Tp) / ∑Tp → expresso em constantes de tempo (∑p - ∑z) / ∑z → expresso em pólos e zeros SISTEMAS II
14.2. ANÁLISE DO MODO LENTO MODO LENTO SUBTRATIVO: geramos zero à esquerda do pólo na malha fechada (Tzs + 1) / (Tps + 1), onde Tz < Tp ou |z| > |p| Conseqüência na resposta transitória: piora ts MODO LENTO ADITIVO: geramos zero à direita do pólo na malha fechada (Tzs + 1) / (Tps + 1), onde Tz > Tp ou |p| > |z| Conseqüência na resposta transitória: piora ts, piora Mo SISTEMAS II