Download
1 / 20
200 likes | 344 Views
Hard Real-Time Scheduling for Low-Energy Using Stochastic Data and DVS Processors. Flavius Gruian Department of Computer Science, Lund University Box 118 S-221 00 Lund, Sweden Tel.: +46 046 2224673 e-mail: Flavius.Gruian@cs.lth.se. Dynamic Voltage Scaling (DVS).

E N D
Hard Real-Time Scheduling for Low-Energy Using Stochastic Data and DVS Processors Flavius Gruian Department of Computer Science, Lund University Box 118 S-221 00 Lund, Sweden Tel.: +46 046 2224673 e-mail: Flavius.Gruian@cs.lth.se
Dynamic Voltage Scaling (DVS) P: dynamic power dissipation for CMOS C: effective switched capacitance V: voltage f: frequency of the clock
Different Abstraction Level for Power Saving • Task set level • Scheduling at inter-task level • Task level • Scheduling at intra task level. Insert re-scheduling points inside a task
Different Abstraction Level for Power Saving • DVS for soft real-time systems • Deadline misses are allowed • QoS is kept • DVS for hard real-time systems • No deadline miss is allowed
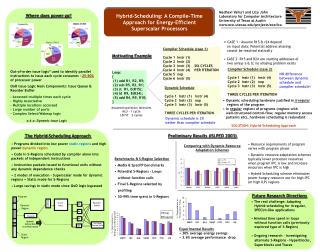
Three execution mode for a task Mode 1: ideal schedule ; Mode 2: WCET oriented schedule; Mode 3: stochastic schedule
Obtaining Stochastic Schedule • Obtained off-line • Obtained by simulation • Built and improved at runtime
Obtaining Stochastic Schedule E: average energy for the whole task WX: worst case number of clock cycles of a task cdf : cumulative density of probability function, cdfx=P(X<=x) e: energy consumption for clock cycle y
Obtaining Stochastic Schedule Ky: the clock length associated to clock cycle y A: the maximum execution time for a task to complete Goal of DVS: to minimize E
Obtaining Stochastic Schedule by mathematical induction:
Optimal Values -> Real Case Values • Optimal clock length ky may not overlap with the available clock lengths, need to be converted to real clock cycles • Find two bounding available clock cycles CKi<Ky<=CKj • Distribute the work of the ideal cycle into two parts:
Off-line Task Stretching • Computing stretching factors in an iterative manner, from the higher to the lower priority tasks ( priority computed by RMS) • For the tasks which already have assigned a stretching factor, we use that one • For the rest of the tasks, assume they will all use the same and yet to be computed stretching factor
On-line Slack Distribution • An early finishing task may pass on its unused processor time for any of the tasks executing next • Not all the slacks can be used by any task at any time, because deadlines have to be met at the same time
On-line Slack Distribution • Multiple levels slacks • If the tasks in the task set have m different priorities, we use m levels of slacks • The slack in each level is a cumulative value: the sum of the unused processor times remaining from the tasks with higher priority
Run-time Management of Slack Level • Whenever an instance k of a task Ti starts executing (with priority i), it can use an arbitrary part of the slack available at level i, Si. • Allowed executing time for Ti : • Remaining slack from level I will degrade into level i+1 slack. Update each level slack with:
Run-time Management of Slack Level • Whenever a task instance finishes its execution, if it finishes before its allowed time, it will generate some slack: • This slack can be used by the lower priority tasks. The level slacks are updated according to:
Slack Assignment • Greedy: the task gets all the slack available for its level • Mean proportional: the task gets the slack according to the proportion of their mean execution time
Conclusions • DVS policy for hard real-time systems • Both off-line and on-line scheduling decisions are taken • Scheduling at both task level and task set level • Task splitting • Multi-level slacks