Download
1 / 10
100 likes | 112 Views
Explore energy-efficient scheduling policies for systems with DVS processors, trade speed for lower energy, and fixed-priority RT-scheduling. Utilize stochastic data and task-level scheduling to minimize energy consumption in the long run.

E N D
Lund Institute of Technology Sweden Embedded Systems Design Laboratory Hard Real-Time Scheduling for Low-EnergyUsing Stochastic Data andDVS Processors Flavius Gruian< flavius.gruian@cs.lth.se > ISLPED'01
Talk Outline • Problem Definition • Task Level Scheduling • Task-Set Scheduling • Offline • Online • Experiments • Conclusions ISLPED'01
Problem Definition Find an energy efficient scheduling policy for: • Systems with DVS processors • Trade speed for lower energy • Fixed priority RT-scheduling • (RM/DM) • Tasks with probabilistic behavior • Execution time between [BCE,WCE] Sample characteristic of a three supply voltage DVS processor ISLPED'01
X 0 X BCE WCE 0 BCE WCE X 0 BCE WCE deadline WCE-stretch Ideal No scaling X 0 BCE WCE Stochastic Task Level Scheduling Basics • Stochastic schedule: • Accelerated execution • Minimize the energy in the long run • Use probability distribution function ISLPED'01
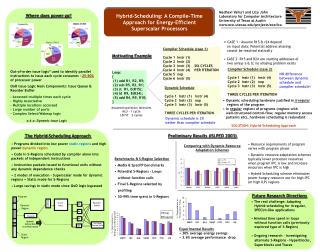
Obtaining a stochastic schedule for a processor with clocks speeds f, f/2, f/3 1 1 - cdf 0.8 1-cdf function for a normal distribution mean = 70 std. dev. = 10 0.6 80% of WCE cycles 0.4 0.2 cycles WCE at f WCE at f 0 0 20 40 60 80 100 Cycle energy Mean = 70% 27@f/3 47@f/2 26@f Allowed is 200% of WCE at clock f 100% of WCE cycles Task Level Scheduling Example ISLPED'01
Task Set Offline Scheduling • Use ”scheduling points analysis” [Lehoczky,Sha,Ding 89], [Shin&Choi 99] • Find a minimal required processor speed for which the deadlines are still met even for WCE • Different subsets - different minimal speeds • Consequences • Usually high priority tasks require higher speed • Processor utilization grows significanlty(most cases can do better than the worst case limit of 0.69) ISLPED'01
Task Set Online Scheduling • Remaining time slack from early finishing instances used to slow down future tasks. • Must keep Worst Case Response Time: • Use slack (priority) levels • A task instance: • Will use higher level slack • Will produce lower level slack • If there are no ready tasks, the running one to use all time to the next arrival [Shin&Choi99] ISLPED'01
Experiments (I) • Upper Bound: • Post execution analysis – All instances are uniformly stretched • Ideal Stretch: • Actual execution times become known at arrival • Offline + 1 stretch: • ”Lonely” instance stretched till next arrival • All: • Offline + online slack distribution + task level ISLPED'01
sets of 100 tasks 100% 90% Upper Bound 80% All 70% Ideal stretch 60% 50% Offline+1stretch 40% 30 % 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 BCE/WCE Experiments (II) 100% is forSingle voltage + Idle (NOP) NOP power = 20% of mean Power down = 5% of mean Energy reduction ISLPED'01
Conclusions Hard RT Systems can be energy efficient: • Use DVS processors • Use better scheduling policies The presented scheduling approach: • Tasks with fixed priority • Both offline and online phases • Both at task level and task set level • Employs data about the stochastic behavior of the tasks to derive more efficient schedules ISLPED'01