Download
1 / 9
90 likes | 208 Views
Team Nemisys. 2002 IEEE Southeastern Conference Hardware Competition. The Team. Team Leader & Circuit Design. MCU Development & Serial Interface. Algorithm Design & LabVIEW Development. Circuit Layout & LabVIEW Development. Team Goal. Design and build an autonomous pong-playing robot

E N D
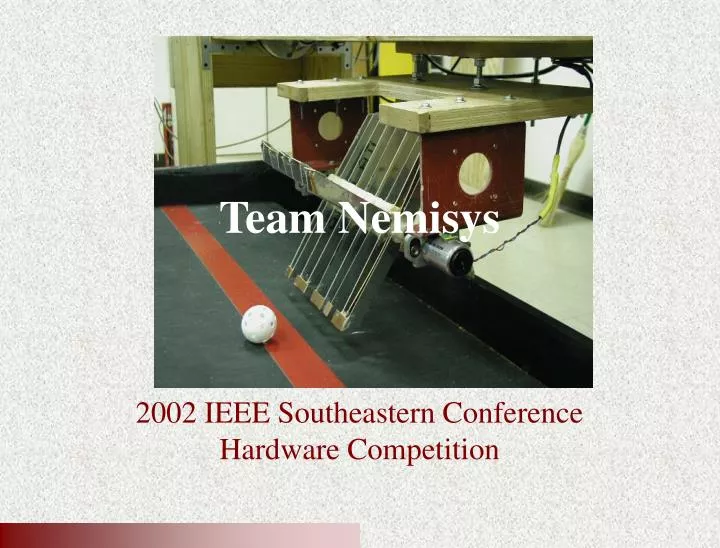
Team Nemisys 2002 IEEE Southeastern Conference Hardware Competition
The Team Team Leader & Circuit Design MCU Development & Serial Interface Algorithm Design & LabVIEW Development Circuit Layout & LabVIEW Development
Team Goal • Design and build an autonomous pong-playing robot • Use image analysis to track, catch, and return a white ball on a black playing field
High Level Description PC (Image Processing) Encoder MCU Camera DC Motor Motor Control Circuit
TargetDetection • NTSC Camera • 30 frames/sec. output • 640x480 B/W picture • PC • Cost effective • National Instruments LabVIEW • Short design time • Communicates position over RS-232 serial port to MCU (Ubicom SX28)
Ubicom SX28/AC • Cost efficient • 19.2 Kbps serial input • Mechanically Linked DPDT Relays • On/off switch • Direction control • Rotary Encoder • 1/256” resolution • Bi-Polar DC Motor • 3000 RPM Target Capture
Return System • Two 5V DC motors • Quad blade spindle design • Low air resistance
Milestones 1/27 Camera/PC Interface Ready 2/5 Microcontroller Selected 2/9 Image Processing LabVIEW Code Written 2/9 Successful Test of Target Recognition System 2/13 Team Web Page Developed 2/14 Target Capture System Designed 2/14 Rotary Encoder Verified Operational 2/17 Successful Test of Target Recognition System with RS-232 Output 2/27 MCU Target Capture Code Written 3/12 Robot Housing Constructed 3/13 Motor Control Design switch from Full-Bridge Circuit to Relays 3/18 Successful Test of Motor Control Relay Circuit (hard-coded inputs) 3/19 Successful Test of Target Capture System 3/26 Successful Integration of Target Detection System and Target Capture System 4/1 Successful Implementation of LabVIEW Prediction Algorithm 4/5-4/7 SECON Competition
Accomplishments & Successes • Completed construction and successful operation of robot requirements • Participated and placed 5th in 2002 IEEE Southeastern Conference Hardware Competition (out of 28 teams) • Beat Ole Miss!! (who placed 23rd) Acknowledgements • Dr. Lori Bruce Senior Design Team Advisor • Dr. James C. Harden Senior Design Instructor • Dr. Nick Younan IEEE Faculty Advisor • Danny Parker Robotics Team Advisor

![[Team name] Team Award](https://cdn4.slideserve.com/678300/slide1-dt.jpg)