Download
1 / 31
310 likes | 474 Views
Requirements for ITER CODAC. Franck Di Maio CODAC & IT CHD Department. Outline. Introduction: PSH & Mini-CODAC R&D Tasks The EPICS Decision Plans Self-Description Architecture & tools Conclusion. Introduction. ITER I&C Architecture. Introduction. CODAC Architecture. Operator

E N D
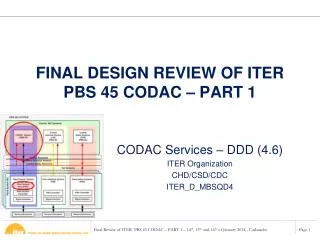
Requirements for ITER CODAC Franck Di Maio CODAC & IT CHD Department
Outline • Introduction: PSH & Mini-CODAC • R&D Tasks • The EPICS Decision • Plans • Self-Description • Architecture & tools • Conclusion
Introduction ITER I&C Architecture
Introduction CODAC Architecture Operator Software Plasma Control Central CODAC Systems Synchronous Data Middleware Plant System Host Fast Controller PLC
Introduction CODAC Architecture Operator Software Plasma Control Central CODAC Systems Plant System Host (PSH) • Is integrated in the Plant System Instrumentation & Control (I&C). • Provides a single point of entry for communication between the CODAC Systems and the plant system’s local controllers. • Is in charge of: • configuration management, • command dispatching, • state monitoring, • alarms and logs interfacing, • data flow and events dispatching. • Is supplied by ITER IO Synchronous Data Middleware Plant System Host Fast Controller PLC
Introduction CODAC Architecture Mini-CODAC • Implements a sub-set of the CODAC systems functions. • Provides a SCADA environment for the development • Configuration Management • Local supervision • Human Machine Interface (HMI) • Alarms, logs, data handling… • Is a tool for acceptance tests at factory and on site Before Integration Mini-CODAC Synchronous Data Middleware Plant System Host Fast Controller PLC
Outline • Introduction • R&D Tasks • The EPICS Decision • Plans • Self-Description • Architecture & tools • Conclusion
R&D Tasks SCADA Survey iFIX • Market Survey + evaluation of selected products against ITER Requirements. • The open source products, EPICS & TANGO, are the ones that match the ITER requirements at best. • TANGO relies on recent technology. • EPICS benefits from a large community and a strong support. Contract with ATOS Origin
R&D Tasks Communication Technologies Survey • Evaluation of selected communication technologies against some specific user-cases. • Channel Access and CORBA have limits but replacement or complement isn’t justified now. • It is recommended to use an API that abstract the implementation. Contract with Cosylab 10
R&D Tasks PSH Prototype Objectives: • On site evaluation of EPICS and Tango • Pre-engineering of CODAC concepts Use cases: • Direct control of the I/O channels of a PLC. • Integration of another type of PLC simulating the control of a plant system. Implemented on both EPICS and TANGO. Contract with Alceli Hunt Beratung
R&D Tasks Prototype Architecture EPICS TANGO Mini-CODAC 1 Mini-CODAC 2 MEDM, Striptool Python/Java/C/C++ Jdraw, atkmoni Python/Java/C/C++ Ethernet NW (PON) S7 IOC, CPS IOC, Modbus IOC, S7 DS, CPS DS,Modbus DS, Simple case DS PSH 1 PSH 2 Ethernet NW (PS LAN) S7 / TCP Modbus / TCP Power Supply Simulation (complex case) Siemens S7/300 Yokogawa Stardom FCJ I/O interface (simple case)
R&D Tasks Prototyping Results • The 2 use cases have been implemented. • Both EPICS and Tango are acceptable base for implementing the functions and the CODAC concepts. PSH Slow Controller
The EPICS Decision • It is a necessity for ITER to standardize the Plant System’s controller software at the very beginning. Currently: 161 plant systems with FAT starting in 2012. • Feb-09: EPICS will be used as the baseline for the software environment for the ITER control system Plant Control Design Handbook, vs. 4.1, 06-May-2009: The software infrastructure for PSH and Mini-CODAC is EPICS version R3.14.10. [R111] EPICS version R3.14.10 shall be used for PS fast controllers. [R112] Communication between PS fast controllers and PSH shall use EPICS Channel Access. [R113] The Operating System of the PS fast controllers shall be Linux (version [TBD]). Deviations may be considered by IO for difficult real-time cases. … and PLC are Siemens Simatic S7 (same document)
Outline • Introduction • R&D Tasks • The EPICS Decision • Plans • Self-Description • Architecture & tools • Conclusion
Plans Core Systems • Core functions: • Communications • “SCADA” functions: • HMI • Alarm Handling • Error & trace logging • Parameters monitoring • Plant system supervision • Data Archiving • Testing • Configuration management (self-description) • To be implemented by packaged CODAC core systems • Built and distributed in an incremental manner. • One major release / year (1st quarter) • Starting from 2010 • According to the Mini-CODAC architecture for now.
Plans Roadmap Priorities: • Integrate PLCs (Siemens S7) • Develop configuration management (self-description) • Freeze the Application Programming Interfaces (APIs) • Integrate fast controllers (EPICS IOC)
Plans Resources • IO staff estimation: 4-6 ppy (2009-2012) • Task Agreement with ITER-IN (3 years, from 2009/Q3) on PSH and Prototype Mini-CODAC • Support contract (3 years, from 2009/Q4) for EPICS, QA & user support. • New contracts in 2010 • Surveys and collaborations • EPICS Tools survey (June 2009) • Task Agreement with ITER-KO on EPICS for Tokamak (August 2009)
Outline • Introduction • R&D Tasks • The EPICS Decision • Plans • Self-Description (Denis Stepanov) • Architecture & tools • Conclusion
Plant System Self-Description …is a concept of providing all the necessary information about Plant Systems along with the Plant Systems themselves. The ultimate goal is to make both Plant Systems I&C and CODAC software system-neutral, decreasing the hard-coded programming part of the system specificity and increasing the data configuration part. … represents static configuration data not changing during the Plant System operation. It can be modified through dedicated maintenance procedures. … forms a part of software interface between the Plant Systems I&C and Central I&C Systems. … shall capture all “hidden knowledge” of Plant System configuration, at least in the form of documentation. … is expressed in XML constrained by a well-defined W3C XML Schema (XSD). … has to be introduced and actively supported by the software from the very beginning to avoid being a huge set of inconsistent, unreliable, poorly maintained data.
Self-Description Scope The Self-Description Data consist of: • Plant System I&C unique identification; • Command list; • Alarms list; • Set-points list; • Plant System I&C Operating Limits and Conditions; • Physical (raw) signals list (I/O); • Processed / converted signals list; • Data streams list; • Logging messages list; • Definition of the Plant System I&C state machine in accordance with the defined Plant System operating states; • Definitions of Plant System I&C HMI; • Initial values for run-time configuration used for Plant System I&C start-up; • Identification of source codes and binary packages of the Plant System I&C specific software; • Documentation. (as stated in the Plant Control Design Handbook v 4.1, May 2009)
Device descriptions for EPICS and TANGO in XML EPICS (mapping of EPICS text templates and substitution lists) TANGO (mapping of TANGO’s MySQL database)
Self-description dataflow: operation PS parameters 2 7 PS response PS dynamic parameters 1 3 4 PSH static configuration PS devices dynamic parameters PS data PS data 5 6
Self-description dataflow: development CODAC test data PS development progress 12 12 12 PS requirements and needs 11 PCDH deliverables 10 Problem report PS parameters 4 1 9 PS description PS response 3 PS data 5 PS dynamic parameters 2 PSH static configuration 2 Devel tools’ project files Program development 8 PS data 6 PS devices dynamic parameters 3 PS devices programs + static configuration 7
Outline • Introduction • R&D Tasks • The EPICS Decision • Plans • Self-Description • Architecture & tools • Conclusion
Core Systems, Mini-CODAC Architecture CODAC Systems: • Alarm Handling (AH) • Error & Trace Logging (EL) • Live Database/Monitoring (LD) • Data Archiving (DA) • Data Retrieval (DR) • Testing Tools (TT) • Communication Middleware (CM) • Generic Plant System Software (PS) • Visualization / HMI Builder (VB) • Plant System self description (SD)
Pure EPICS Architecture Configuration Data Archiver • Select the best EPICS mature tools to cover the core functions • Benefit: • Stable • Widely used (support) • Limits: • Not fully consistent • Migration to new ITER adapted tools. • The 2010 version: • EPICS tools • A 1st version of the self-description system • S7 PLC integration Synoptics Errors/trace Logging Alarms
The Eclipse Mini-CODAC Alternative • Use the Eclipse technology for Mini-CODAC • a consistent environment integrating the different functions. • Join the CSS club for adopting/improving and developing new tools. • Considered for future releases (> 1). Use Eclipse RCP for Mini-CODAC
Vs 1 Architecture (pure EPICS) • EPICS components: • VDCT • SNL and Sequencer • EDM • autoSave • ALH • Channel Archive/Retrieval • Channel Access Gateway • IocLogServer • Wireshark-CACasnooper • CAJ • CoThread • S7PLC driver
Conclusion - Main Requirements IO DA DA Lab Ind 2012: start of FAT 2015: start of integration 2018: first plasma Specific constraints • The ITER schedule • The ITER procurement model • The ITER size (~200 systems) Main requirements: • A very good EPICS Base for many years (procurement: 10+) • Prescribed as a standard for all plant systems controllers, from R3.14.10. • Plant System Host with high reliability and high performance • The critical interface between IOCs and central systems • Key components: CA gateway, S7 driver, RIOC (Linux, ATCA?) • Implementation of the self-description concept • A “prescriptive” management system for the plan systems • With special requirements (XML, deliverable) • New tools for central services and HMI • CSS tools? To be evaluated for Vs 2 or 3 • A stable API for the high-level applications • Required for the design of ITER-specific applications (ex: scheduling system).