Download
1 / 15
180 likes | 627 Views
Real-time Object Image Tracking Based on Block-Matching Algorithm . ECE 734 Hsiang-Kuo Tang Tai-Hsuan Wu Ying-Tien Lin. Outline. Introduction Motion Tracking Theories Different Motion Analysis (DMA) Method Block-Matching Algorithm (BMA) Implementation Issues Methodology & Optimizations

E N D
Real-time Object Image Tracking Based on Block-Matching Algorithm ECE 734 Hsiang-Kuo Tang Tai-Hsuan Wu Ying-Tien Lin
Outline • Introduction • Motion Tracking Theories • Different Motion Analysis (DMA) Method • Block-Matching Algorithm (BMA) • Implementation Issues • Methodology & Optimizations • Different Approaches – C++, PLX, ET44M210 • Demonstration
Introduction • Motivation: There are many commercial applications about motion tracking • Robotic Vision • Electrical Pet • Traffic Monitoring • More…. • Objective: Efficient Implementation in portable embedded system • Simple but powerful algorithms • Smart optimizations by developers
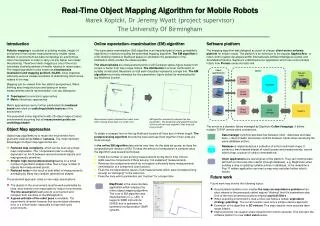
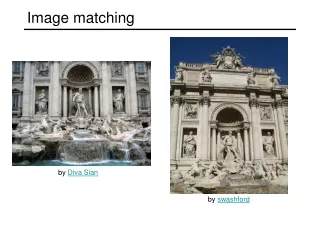
The motion object is here! Object-tracking algorithm • Different motion analysis method • SAD of consecutive frames • A threshold is set to detect the moving
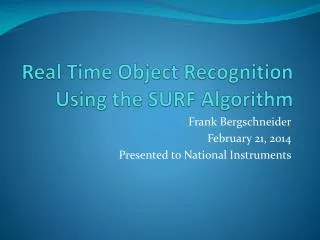
The size of tracking area is not the same as the size of tracking object ! Object-tracking algorithm • Disadvantage of DMA method • May include covered or covering background
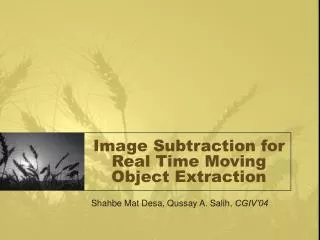
Using motion estimation to adjust the size of tracking area Object-tracking algorithm • Solution: Block-Matching Algorithm (BMA) • Using motion vector to compensate the redundant part of tracking area
Implementation Methodology & Optimization • Capture images from I/O device & transfer RGB to YUV values • Pre-compute YUV values & save them in ROM • Compute SAD values between adjacent frames • Parallel Processing as much as possible • Compute motion estimation & compensate tracking area • Replace full-search with 41SWS/BPD (FS-like sub-sampling)
Implementation approaches • Simulation in C++ program • Evaluate the whole algorithm • Simulation in PLX • Implement some optimizations • Realization in ET44M210 micro-controller • Find the performance bottlenecks
Implementation approaches - PLX • Optimizations: Parallel Processing • Absolute value calculation: 4 ops per register abs8 macro Rd,Rs1,Rs2 // used in SAD, MAD operations psub.1.u Rtmp1,Rs1,Rs2 psub.1.u Rtmp2,Rs2,Rs1 padd.1.u Rd,Rtmp1,Rtmp2 endm • Load & store operation alignment: 4 ops/register mix.4.r Rtmp6,RGB2,RGB1 // fit 4 RGB values in 1 register mix.4.r Rtmp7,RGB4,RGB3 store.8 Rtmp6,PLCD,0 // plot them in LCD screen store.8 Rtmp7,PLCD,8
Implementation approaches - PLX • Results: DMA/BMA between two frames
Evaluation of ET44M210 • When running at full speed (48MHz), 11 frames per cycle can be achieved. • But due to the USB module, the ET44M210 can only run at 24MHz. • Lots of instructions must be cost to handle USB transmission, so that the average performance reduced to 0.9 frame per second.
Let’s make a briefdemonstration about motion tracking on ET44M210 chip…