Download
1 / 14
140 likes | 286 Views
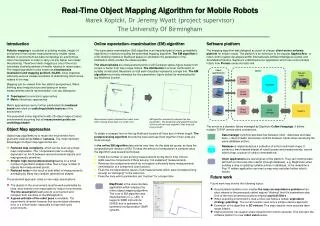
Image Subtraction for Real Time Moving Object Extraction. Shahbe Mat Desa, Qussay A. Salih, CGIV’04. Outline. Introduction Automatic Motion Detection Background Reconstruction Noise Reduction Experiment Results Conclusion. Introduction.

E N D
Image Subtraction for Real Time Moving Object Extraction Shahbe Mat Desa, Qussay A. Salih, CGIV’04
Outline • Introduction • Automatic Motion Detection • Background Reconstruction • Noise Reduction • Experiment Results • Conclusion
Introduction • In recent years, development of motion analysis in many vision systems arise researches in conjunction with the immense attentions of employing real time application to control complex real world system such as ATM security, airport surveillance, traffic monitoring, etc. • The basic idea of mostly automated surveillance applications is that motion detection continuously operating and the system is triggered to perform higher-level processes such as object recognition and tracking. • Standards such as MPEG-1, MPEG-2 use block-based motion compensation and DCT techniques may be time consuming and cause complex computation.
Objectives • Automatic motion detection • Reference background update • Segmentation of dynamic region from static region • Noise reduction • Reliable and less complex • Real time and auto-completion
Motion mask extraction • Motion detection issue • As a binary labeling problem: • Automatically detecting objects
Motion mask extraction(2) • Image subtraction • Background subtraction, dB: |fk – B| • Temporal differencing, dk-1, dk+1: |fk-1 – fk|, |fk+1 – fk| • Calculate motion mask, motionk, with threshold Td
Background reconstruction • Background varies from time to time as the scene changes. w, h: width and height of frame dynamic_pixel: Σ(motionk) B: background image, f0 M: motion threshold, 4%
Noise reduction • Two operations • Erosion followed by dilation • Erosion • With structuring element E • Result in a value of 1 in motion mask motionk at P=(x,y) if the spatial arrangement of ones in EPfully matches that of motionk. => Removes isolated foreground pixels
Noise reduction (2) • Dilation • With structuring element D • The result is the set of all points P=(x,y) so that reflection and motionkoverlap by at least one nonzero elements. => Adds pixels to the boundary of the object
Result (1) • Manual generate ground truth G • Performance evaluator: Root Mean Square Error (RMSE) measurement G(x,y): ground truth F(x,y): output
Results (2) • Four different-scene test sequences: • Moving vehicles on road • People walking indoors and outdoors
Result (3) • Compared with the common background subtraction:
Conclusion • Proposed a less-complex method that enables high-level real time processes. • Compared with common background extraction method, the method is more reliable.