Download
1 / 27
280 likes | 498 Views
Continuous System Modeling. Need various types models. Advances in system development ultimately rely on well-constructed predictive models Applications: traditional fields such as electrical and mechanical engineering newer domains such as information and bio-technologies

E N D
Need various types models • Advances in system development ultimately rely on well-constructed predictive models • Applications: • traditional fields such as electrical and mechanical engineering • newer domains such as information and bio-technologies • Using appropriate simulation software, we can derive solutions to difficult problems using such models • Success often depends on having a variety of modeling approaches available to formulate the right model for the particular issue at hand • Therefore, a broad familiarity with different types of models is desirable
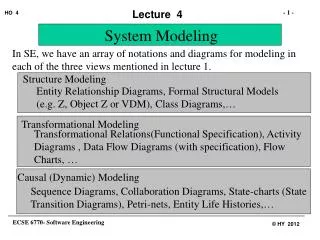
Continuous System Models • Continuous system models were the first widely employed models and are traditionally described by ordinary and partial differential equations. • Such models originated in such areas as physics and chemistry, electrical circuits, mechanics, and aeronautics. • They have been extended to many new areas such as bio-informatics, homeland security, and social systems. • Continuous differential equation models remain an essential component in multi-formalism compositions.
Multi-formalism Compositions • A host of formalisms have emerged in the last few decades that greatly increase our ability to express features of the real world and employ them in engineering systems. • Such formalisms include Neural Networks, Fuzzy Logic Systems, Cellular Automata, Evolutionary and Genetic Algorithms, among others. • Hybrid models combine two or more formalisms, e.g., fuzzy logic control of continuous manufacturing process. • Most often, applications will require such hybrids to address the problem domain of interest.
M&S Entities and Relations Device for executing model Real World Simulator Data: Input/output relation pairs modeling relation simulation relation Each entity is represented as a dynamic system Each relation is represented by a homomorphism or other equivalence Model structure for generating behavior claimed to represent real world
d q(t) / dt = x(t) M&S Framework: Continuous case Real World Simulator modeling relation simulation relation • Numerical Integration: • Accuracy • Error effects Model • Validity: • Accuracy of • -retro-diction • -prediction
Canonical Ordinary Differential Equation Model d q1(t)/dt = f1(q1(t), q2(t), ..., qn(t), x1(t), x2(t),..., xm(t)) d q2(t)/dt = f2(q1(t), q2(t), ..., qn(t), x1(t), x2(t),..., xm(t)) ... d qn(t)/dt = fn(q1(t), q2(t), ..., qn(t), x1(t), x2(t),..., xm(t))
q(2h) q(h) q(0) q(3h) 0 2h 3h h = f(q(t),x(t)) = f(q(t),x(t)) Numerical Integration Euler or rectangular method. q((n+1)h)=q(nh)+h*f(q(nh),x(nh))
Continuous system simulation languages and systems • state-space description languages: • ContinuousSystemSimulationLanguage (CSSL) standard, e.g., ACSL • block oriented simulation systems, e.g., Simulink Van der Pol Oscillator CSSL PROGRAM Van der Pol INITIAL constant k = -1, x0 = 1, v0 = 0, tf = 20 END DYNAMIC DERIVATIVE x = integ(v, x0) v = integ((1 – x**2)*v – k*x, v0) END termt (t.ge.tf) END END
Lotka Volterra Model and Behavior • Exercise: • write the ODE for the model • find the equilibrium point of the Lotka-Volterra model • investigate the oscillations around this equilibrium. • where do the maximum and minimum populations occur? • show that small oscillations around the equilibrium are approximated by the 2nd order linear oscillator. py = prey population pd = predator population
Limit Cycle and Chaos are Opposites • limit cycles – initial state eventually winds up in a periodic loop or cycle • chaos – trajectories are sensitive to initial states – small difference in initial state results in large difference in trajectory • Note – ODE models are deterministic – if the input is zero, then if a trajectory returns to an earlier state, it will get into a cycle • If a chaotic model has a trajectory that comes close to an earlier state than it diverges from that earlier portion due to its sensitivity to initial states • BUT – a chaotic model can have a “strange attractor” i.e., a subset to which always returns, though not with a fixed period.
Rössler Model and Chaotic Behavior state plane (v , z) to x time behavior interactive applet at: http://www.geom.uiuc.edu/~worfolk/apps/Rossler/
Rössler Behavior a = b = 0.2, and c = 8.0. http://mathforum.org/advanced/robertd/rossler.html http://astronomy.swin.edu.au/~pbourke/fractals/rossler/
Lorenz Attractor– Butterfly Effect For a < 1 the solution rapidly decays to the origin X=Y=Z=0. This corresponds to no motion in the fluid context. For a > 1 (e.g. a=5) the orbit approaches one of two fixed points (depending on the initial values) away from the origin. The fixed points are at X 2 = Y 2=Z=a-1. In the convection context this corresponds to nonzero but steady fluid flow (in a circulating "roll" configuration). At larger values of a, for example a=24.1, the long time dynamics may either approach one of the fixed points or a strange attractor (depending on the choice of initial values), which coexist at these values of a. (Choose nearby initial values to find solutions that converge to the fixed points.) For a>24.74 the strange attractor collides with the fixed points, which become unstable so that practically all initial values lead to the familiar butterfly dynamics. a=28 gives the usual picture. Java applet: http://www.cmp.caltech.edu/~mcc/chaos_new/Lor_docs/intro.html http://astronomy.swin.edu.au/~pbourke/fractals/lorenz/
References/Literature • Course Notes from: B. P., H. Praehofer and T. G. Kim (2000). Theory of Modeling and Simulation: Integrating Discrete Event and Continuous Complex Dynamic Systems, (2nd Ed.) Academic Press, NY.) • On reserve: A First Course in Differential Equations: The Classic Fifth Edition (Hardcover) by Dennis G. Zill, Brooks Cole; 5 edition (December 8, 2000) • Others: • The Nonlinear Workbook: Chaos, Fractals, Celluar Automata, Neural Networks, Genetic Algorithms, Gene Expression Programming, Support Vector Machine, Wavelets, Hidden Markov M (Paperback) by Willi-Hans Steeb, 588 pages, Publisher: World Scientific Publishing Company; 3rd edition (July 15, 2005) • Modeling and Analysis of Post-Conflict Reconstruction, Damon B. Richardson, Richard F. Deckro, and Victor D. Wiley, JDMS: The Journal of Defense Modeling and Simulation,October 2004, Volume 1 Number 4 • Fernando J. Barros, A Formal Representation of Hybrid Mobile Component, SIMULATION, May 2005; 81: 381 - 393. • What is signal and what is noise in the brain? A.Knoblauch, G.Palm, Biosystems 79(1-3), pp 83-90, 2005. • Discrete Event Multi-Level Models for Systems Biology, Uhrmacher, A.M. and Degenring, D. and Zeigler, B.P, LNCS Transactions on Computational Systems Biology, Vol. 1, 3380/2005, pp. 66-85. • Modifications of the Helbing-Molnár-Farkas-Vicsek Social Force Model for Pedestrian Evolution, Taras I. Lakoba, D. J. Kaup, and Neal M. Finkelstein, SIMULATION 2005 81: 339-352.