Download
1 / 28
280 likes | 433 Views
Adaptive, Transparent Frequency and Voltage Scaling of Communication Phases in MPI Programs. Min Yeol Lim Computer Science Department Sep. 8, 2006. Growing energy demand. Energy efficiency is a big concern Increased power density of microprocessors Cooling cost for heat dissipation

E N D
Adaptive, Transparent Frequency and Voltage Scaling of Communication Phases in MPI Programs Min Yeol Lim Computer Science Department Sep. 8, 2006
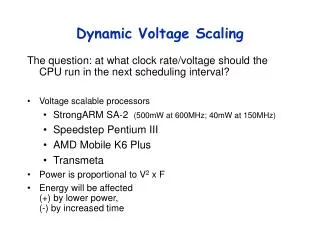
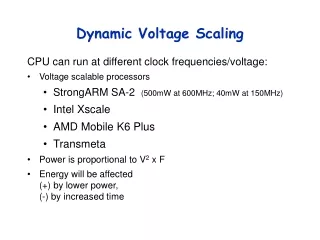
Growing energy demand • Energy efficiency is a big concern • Increased power density of microprocessors • Cooling cost for heat dissipation • Power and performance tradeoff • Dynamic voltage and frequency scaling (DVFS) • Supported by newer microprocessors • Cubic drop on power consumption • Power frequency × voltage2 • CPU is the major power consumer : 35~50% of total power
Power-performance tradeoff • Cost vs. Benefit • Power performance • Increasing execution time vs. decreasing power usage • CPU scaling is meaningful only if benefit > cost P1 E = P1 * T1 Benefit Power P2 E = P2 * T2 Cost T1 T2 Time
Power-performance tradeoff (cont’) • Cost > Benefit • NPB EP benchmark • CPU-bound application • CPU is on critical path • Benefit > Cost • NPB CG benchmark • Memory-bound application • CPU is NOT on critical path 0.8Ghz 1.2 1.6 1.0 2.0 1.4 1.8
Motivation 1 • Cost/Benefit is code specific • Applications have different code regions • Most MPI communications are not critical on CPU • P-state transition in each code region • High voltage and frequency on CPU intensive region • Low voltage and frequency on MPI communication region
Time and energy performance of MPI calls • MPI_Send • MPI_Alltoall
Motivation 2 • Most MPI calls are too short • Scaling overhead by p-state change per call • Up to 700 microseconds in p-state transition • Make regions with adjacent calls • Small interval of inter MPI calls • P-state transition occurs per region Fraction of intervals Fraction of calls Call length (ms) MPI calls interval (ms)
R1 R2 R3 Reducible regions user MPI library A B C D E F G H I J time
Reducible regions (cont’) • Thresholds in time • close-enough (τ): time distance between adjacent calls • long-enough (λ): region execution time δ < τ δ < τ δ > λ user MPI library A B C D E F G H I J time
How to learn regions • Region-finding algorithms • by-call • Reduce only in MPI code: τ=0, λ=0 • Effective only if single MPI call is long enough • simple • Adaptive 1-bit prediction by looking up its last behavior • 2 flags : begin and end • composite • Save patterns of MPI calls in each region • Memorize the begin/end MPI calls and # of calls
P-state transition errors • False-positive (FP) • P-state is changed in the region top p-state must be used • e.g. regions terminated earlier than expected • False-negative (FN) • Top p-state is used in the reducible region • e.g. regions in first appearance
Optimal transition top p-state reduced p-state top p-state Simple reduced p-state Composite top p-state reduced p-state P-state transition errors (cont’) A B A B A B Program execution users MPI library FN FN
Optimal transition top p-state reduced p-state top p-state Simple reduced p-state Composite top p-state reduced p-state P-state transition errors (cont’) A A A A A A Program execution users MPI library FP FP FP F N FN
Selecting proper p-state • automatic algorithm • Use composite algorithm to find regions • Use hardware performance counters • Evaluation of CPU dependency in reducible regions • A metric of CPU load: micro-operations/microsecond (OPS) • Specify p-state mapping table
Implementation • Use PMPI • MPI profiling interface • Intercept pre and post hooks of any MPI call transparently • MPI call unique identifier • Use the hash value of all program counters in call history • Insert assembly code in C
Results • System environment • 8 or 9 nodes with AMD Athlon-64 system • 7 p-states are supported: 2000~800Mhz • Benchmarks • NPB MPI benchmark suite • C class • 8 applications • ASCI Purple benchmark suite • Aztec • 10 ms in thresholds (τ, λ)
Benchmark analysis • Used composite for region information
Taxonomy • Profile does not have FN or FP
Comparison of p-state transition errors • Breakdown of execution time Simple Composite
τ evaluation • SP benchmark
τ evaluation (cont’) MG CG BT LU
Conclusion • Contributions • Design and implement an adaptive p-state transition system in MPI communication phases • Identify reducible regions on the fly • Determine proper p-state dynamically • Provide transparency to users • Future work • Evaluate the performance with other applications • Experiments on the OPT cluster
State transition diagram • Simple begin == 1 else else OUT IN end == 1 not “close enough” “close enough”
State transition diagram (cont’) • Composite else not “close enough” OUT not “close enough” end of region operation begins reducible region “close enough” IN REC else “close enough” pattern mismatch
Benchmark analysis • Region information from composite with τ = 10 ms