Download
1 / 51
510 likes | 544 Views
Explore the symmetries of space and time in relation to Maxwell's equations and the constancy of the speed of light. Learn about Lorentz transformations, proper distance, metric tensors, and examples of valid transformations, such as boosts and rotations.

E N D
11. The Special Theory of Relativity 11A. Time is the Fourth Dimension Symmetries of Space • We have already talked about some symmetries of space and time • Rotations and space translations are both good symmetries • These are all symmetries of Maxwell’s equations • Consider the distance formula • This distance is preserved by all these transformations • Laws of physics should be invariant under transformations that preserve distance
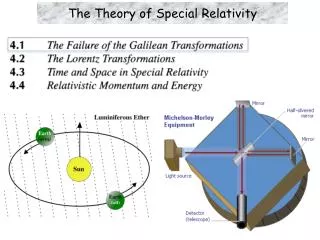
Symmetries With Time • There are some additional symmetries of conventional physics • Time translation,defined as • Pretty obviously, Maxwell’s equations in vacuum remain invariant • Galilean transformation: • Is this a symmetry of Maxwell’s equations in vacuum? • Suppose an object is following a trajectory x(t) • Then the velocity will be: • But according to theprimed observer, thevelocity will be: • However, according to Maxwell’s equations, light always moves at speed c • Maxwell’s equations are inconsistent with Galilean transformations
Constancy of Speed of Light • Conflict between Maxwell’s equations and Galilean transformation • In the presence of media, this is hardly surprising • Laws of physics look different if you are moving in a medium compared to standing still • It was attributed to “ether”, an undetected background medium • However, no experiment succeeded in finding this ether • Einstein speculated that the Galilean formula was wrong • He speculated that all observers would see the same speed of light • Let a light beam move from x at txto y at ty • One observer sees • Any other observerwill also see • So, whatever the correct formula, we must have (ty,y) (tx,x)
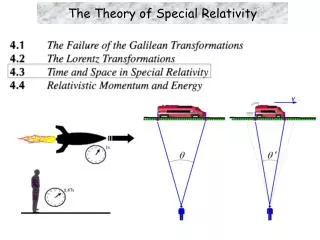
Time and the Distance Formula • Recall the conventional distance formula • Recall that rotations and space translations leave this invariant • But this formula doesn’t include time, and can’t explain why time translations nor Galilean translations work • In fact, Galilean transformations don’t work • Maybe we need to include time in this distance formula • The equation at top suggests a formula for the proper distance: • This distance is invariant under thetranslations we found before, and the rotations • But it is not invariant under Galilean transformations
Time is the Fourth Dimension • The appearance of time in this formula suggests time is another dimension • Actually, to make the units consistent, ct is the fourth dimension • We will put together time and three space dimensions into a vector we will collectively denote x, with components denoted by superscripts • The factor of c is a conversion constant to turn “seconds” into “meters” • No more significant than 12 inches/foot • The only difference between time and the other components is the minus sign in the proper distance formula • Points in spacetime are called “events” and have a location and a time
Proper Distance and Proper Time • Unlike the 3D distance formula, this quantity can have either sign • If s2 > 0, we say the events are spacelikeseparated and call s the proper distance • If an observer sees two events at the same time, s is the same as 3D distance • If s2 < 0, we say the points are timelikeseparated • We then define the proper time, given by • If an observer sees two events at the same place, is the time difference between them • Either of these formulas can be thought of as the actual distance formula • We will use the proper time one • Known as the “mostly minus” convention
The Metric • Write this expression out explicitly in terms of all components: • This is long and awkward. • Define the metric tensor • We then summarize our formula as: • Einstein summation convention: • Any index that appears multiplied with index up and down is summed over • This simplifies our formula to:
Lorentz Transformations • What sort of coordinate transformations leave this expression invariant? • Easy to see that space or time translations will do so • How about four-dimensional “rotations”? • These are called homogenous Lorentz transformations • Or just “Lorentz transformations” for short • Not surprisingly, there are restrictions on • Distance in primed frame will be • We want this to equal • To get these to match, we need: • Or, written as a matrix,
Lorentz Transformation Examples • One example of a valid Lorentztransformation is a rotation (around z): • In coordinates,this is • is theangle of rotation • Another example of a valid Lorentztransformation is a boost (along x): • In coordinates,this is • is the rapidity
What a Boost Means • What is relationship between primed andunprimed observer for a boost? • Imagine an observer at the origin ofspace in the primed coordinates • Recalling that x0 = ct andthinking of x1 as x, this tells us • So this is an observer moving in x-direction at • Often write things in terms of , defined by • Also useful to define • Then a boost inthe x direction can be rewritten • From this you can get the familiarrelationships
Sample Problem 11.1 (1) Consider a boost along the x-axis followed by one along the y-directionby an amount . Then do two more boosts in the same order, this time by an amount –. Show to second order in that the combination is not the identity, but instead is a rotation. • The first two boostsare given by • The combination ofthese two is • The last two steps are the same thing with –
Sample Problem 11.1 (2) Consider a boost along the x-axis followed by one along the y-directionby an amount . Then do two more boosts in the same order, this time by an amount –. Show to second order in that the combination is not the identity, but instead is a rotation. • Multiply them • Compare to rotation around z: • Match to order 2 if = 2
Infinitesimal Proper Time • If we are moving along with an object at uniform velocity, you see it not moving • Therefore is the same as t for this frame • is the time experienced by a moving object • What if an objects is moving non-uniformly? • For short periods of time, it is approximately linear, so we would have • Take the square root • Integrate over time to find proper time (ty,y) (tx,x)
Sample Problem 11.2 A particle accelerates uniformly along the x1 axis, so x1 = ½at2. Find a relationship between t and . How much proper time would it take to reach the speed of light? • We have • Substitute for the proper time: • The integral can be done bytrigonometric substitution, or by Maple • It reaches speed of light at at = c • This formula becomes nonsense for at > c • Though this looks like uniform acceleration, it is not uniform force • An object moving like this would experience rising acceleration
11B. Vectors, Tensors, Covectors, Etc. Scalar, Vector, Tensor • Under a Lorentz transformation, coordinates transform as • A scalar is any quantity, that is unchanged by Lorentz transformation: • A (contravariant) vector is any quantity that transforms like x: • A (contravariant) (rank-2) tensoris any quantity that transforms as • We can generalize to make tensors of any rank • A scalar is a rank-0 tensor • A vector is a rank-1 tensor Sample Problem 11.3 Let vand w be any two vectors. Show the dot product is a scalar.
Covectors; Raising and Lowering Indices • Let us define a covector w as a linear mapping from vectors to scalars • Since it is linear, it must take the form • We can describe w by giving its components w • We can make a covector out of any vector. Define: • Then we have • Turning vector into a covector is called “lowering the index” • In components, we have • We can reverse this process to raise an index • First define the inverse metric g • Note: this is the same matrix as g • Then it is easy to see that • This process is called “raising the index” • This process of raising and loweringindices can be applied to any tensor
Sample Problem 11.4 What happens if we raise one or both indices of the metric tensor g? • Raise one index: • But gand g are inverse matrices • Raise two indices: • Confusing because g now has two meanings: • Let gin green mean metric with both indices raised • Let g in black mean inverse of g • So we have
Invariant Tensors and Covariant Equations • Certain tensors are invariant • When we perform a proper Lorentz transformation, they remain unchanged • These include the metric g andthe 4D Levi-Civita tensor • We can make more invarianttensors by raising or lowering indices,or by multiplying invariant tensors • An equation is covariant if, when true in one Lorentz frame, it automatically is true in all • An equation is manifestly covariant if it follows the following rules: • Any index that is repeated on any term is matched one up and one down • Any index that is not repeated on any term must occur on every term, on both sides of the equation • You can use invariant tensors whenever needed
Sample Problem 11.5 A rank two tensor T is proportional to the product of two vectors vand w. Write all possible expressions for T. • The tensor has two indices and the vectors have one each • We want some sort of expression like • We need to make this expression covariant • Some obvious terms • Some less obvious terms: • However, you can use antisymmetryof Levi-Civita to show
11C. Momentum and Energy Time Dilation • Imagine an object following an arbitrary path through space-time • Proper time passes at a rate • If an object is moving at velocity v, then we have, by definition • We therefore have • Proper time always runs slower than coordinate time • But effects are tiny at low velocities
Four-Velocity • We want, so far as possible, to treat space and time on an equal footing • Consider, for example, the formula for velocity: • This formula is not wrong, because it’s a definition • This formula is horribly non-covariant • It has three components, not four • It treats x0 = ct as special, rather than just any other component • We want a concept like velocity, but applicable in 4D • We need to replace t with something that looks like t at low velocities • Recall, for slow velocities, t and propertime run at almost the same rate • This suggests defining the four-velocity: • Writing it out explicitly, we have:
Four-Acceleration and Proper Acceleration • The four velocity is avector of constant length • We can similarly define the four-acceleration • Consider the Lorentz invariant quantity AA • For an observer temporarily moving along with an object, we would have • This is the acceleration experienced by the object itself • Called the “proper acceleration” • Since AA is Lorentz invariant, we can calculate this in any frame
Sample Problem 11.6 An object moves uniformly in a circle of radius R at angular frequency . What is the proper acceleration a? • Uniform circular motion looks like • The conventional speed is • And therefore • Rewrite all components of x in terms of : • Now work out the four-velocity and acceleration • So the proper acceleration is
Four-Momentum • Consider the conventional expression for momentum • This looks awful and non-covariant • Suppose a process conserves this momentum in one frame • There is no reason to expect it to conserve in another frame • It generally won’t • This suggests we need a different formula for momentum • A logical suggestion would be • It is now a vector • Suppose four-momentum is conserved in one frame • This is manifestly covariant; it will be true in all frames • In terms of conventional velocity, pis given by
Four-Momentum and Energy • All four components of momentum must be conserved • Only conserving three would not be covariant, and makes no sense • What is this fourth component of momentum? • Suppose we have two objects withmass m1 and m2 collide elastically • Write down conservation of p0 • Expand using a Taylor series • The fourth component of momentum is energy! m1 v'1 v1 v2 m2 v'2
Comments on Four-Momentum • The momentum is of fixed magnitude • We can use this, for example, to show that Solving problems with conservation of 4-momentum • Name all the momenta in the problem • Write down conservation of 4-momentum • Rearrange cleverly • Dot the expression into itself • Simplify using pp = m2c2 • Write out any remaining momenta explicitly • Solve the remaining problem
Sample Problem 11.7 (1) A (massless) photon with energy E collides with an electron (mass m) and scatters at an angle compared to the original direction. What is the final energy of the photon? • Call electron initial/final momentum p and p' • Call photon initial/final momentum k and k' • Conservation of momentum: • We don’t care about final electron, and don’t know much about it • Isolate p' • Dot this into itself • Use pp = m2c2 • So p' k p k'
Sample Problem 11.7 (2) A (massless) photon with energy E collides with an electron (mass m) and scatters at an angle compared to the original direction. What is the final energy of the photon? p' k p • Now write out momenta explicitly • Initial and final photon are massless • Call their energies E and E' • Let’s say initial photon is in the x1-direction • Final photon can be in the x1x2-plane • The initial electron is at rest, so • Write out all the dot-products • Substitute in • Solve for E' k'
Newton’s Second and Third Laws • Everybody knows Newton’s second law • In conventional physics, this is equivalent to • But in relativity, p mv • Therefore, one of these equations is false • Consider Newton’s third law • If we assume the momentum equation is correct, this implies • Which yields • And not the other • So we can get conservation of momentum if we assume • Of course, this still doesn’t look manifestly Lorentz invariant • Better would be something like • Or better still,
Confusion and Subtleties • Up to this point, we, and Jackson have been working in SI units • At this point Jackson switches to Gaussian units • This means this chapter’s equations are incompatible with previous chapters • We will, in contrast, continue in SI units • This makes some of our formulas slightly more complicated than Jackson’s • If you want to do it right, you should simply work in units where c = 1 • And while you’re at it, where 0 = 0 = 1 • An additional problem is that, for anything we’ve already defined in three dimensions, we have gotten used to writing with subscripts down • When we go to four dimensions, distinction between up and down • Whenever I write indices as 1, 2, 3, forconventional fields I’ll write them as index up • But when I use x, y, z, I’ll write them down • I will commonly use Latin indices (i, j, k) for indices that only take on values 1, 2, 3
11D. Relativity with Electricity and Magnetism Fields and Partial Derivatives • We’ll be working with fields, which are functions of position • These can be scalar fields, vector fields, etc. • They transform like • We will also be takingpartial derivativesof functions • Certainly we know: • This equation is obviously covariant • Since it is presumably manifestly covariant, we realize partial derivative are like “down” indices • To help us remember this, andto save space, we will write:
Mixing Relativity with E and M • We expect the actual laws of E and M in vacuum to be relativistically invariant • Since we got some thing about relativity from E and M, we wouldn’t be surprised if they are already mostly correct • Many quantities we are currently using are not set up for relativity • We should have four-vectors, not three-vectors, for example Our goal: • Combine various quantities into scalars, vectors, tensors, etc. • Write equations of electricity and magnetism in manifestly invariant form • Change them as little as possible
The Four-Current • We have several vector quantities in E and M • J, E, B, A • We should only have four-vectors (or scalars, or tensors) • Often can make a reasonable guess about the fourth component by looking at suitable equations • Let’s start with J, for whichwe have conservation of charge • Write it out in components • We would expect this to somehow generalize to • It doesn’t take a genius to figure out that • So we have
The Four-Vector Potential • You might think the logical thing to try next would be E • Does it simply become a four-vector? • A point charge at rest produces an E, but no B • But a moving point charge produces both E and B • This suggests something more complicated is going on with E and B • Let’s try working on the vector potential A • This is tricky, because A can depend on choice of gauge • Some gauge choices, like Coulomb gauge, are not Lorentz invariant • Recall, it led to a scalar potential that instantaneously responded to charge • In Lorentz gauge, we found that fields react at speed of light • Lorentz gauge was defined by • This suggests
The Electromagnetic Tensor F • We have still to work out B and E • Let’s start by writing out components of E in terms of A: • Let’s define the electromagnetic tensor • It is trivial to see that • Then we note that • The diagonal components of F automatically vanish: • Therefore F has 43 = 12 non-zero components • 6 independent ones • Let’s work out the restof the non-zero ones: • We can summarize this as • i, j, k only go from 1 to 3
Putting it Together • We’re now ready to write down all of F: • First index is row, second is column • Recall, they are numbered 0, 1, 2, 3 • Fis a rank-2 anti-symmetric tensor • In relativity, B and E are differentcomponents of the same tensor • We can raise the first or second index of F • 1st index: rows 1 – 3 get minus • 2nd index: columns 1 – 3 get minus • And therefore
Maxwell’s Inhomogenous Equations • Let’s try to write Maxwell’s Equations invacuum in a manifestly covariant manner • Ampere’s Law: • Raise theindices on F • Easy to generalize: • What is the = 0 equation? • Ampere’s Law and Coulomb’s Law collapse into a single equation
Gauss’s Law for Magnetism • Write out B = 0 • Two ways to write this in terms of F’s • The sum of thesemust also be zero • Write more succinctly using 3D Levi-Civita tensor • We then notice that • So we write this rule as • We therefore conjecture that the correct general formula is • If this is right, we still have to figure out what this meanswhen is a space index
Faraday’s Law • What is this equation if = i? • Because of anti-symmetry of Levi-Civita, one other index is zero • Other two we will call j and k, space indices • Use the identities • The last expressionis a curl, so this is • This is Faraday’s Law
Maxwell’s Equations Summarized • In relativity, Maxwell’s four equations become two • First one is Ampere’s law and Gauss’s law • Second one is Faraday’s law and no magnetic monopoles • Often, one works with a vector potential, in terms of which • In this case, second equation is automatic: • On second term, change indices • Use anti-symmetry of • Partial derivatives commute with each other, so
The Lorentz Force • One more fundamental equation of electromagnetism needs to be dealt with • We already argued that F should be dp/dt • Write this out in components • Multiply through by • A reasonable conjecture for the Lorentz force equation is • If you like F = ma, write this as
Sample Problem 11.8 (1) Find the general motion of a particle of mass m moving in a constant magnetic field , if it starts at the origin of space and time at = 0 with velocity v. • We need to solve the equation • With both indices raised, we have: • But lower the second index, which meansyou get a minus sign on columns 1 – 3 • We now need to solve the equation • Which works out to • The initial four-velocity is
Sample Problem 11.8 (2) Find the general motion of a particle of mass m moving in a constant magnetic field , if it starts at the origin of space and time at = 0 with velocity v. • The first two equations are trivial to solve • Define the cyclotron frequency • Substitute middle equation in thelast one • This has general solution • Substitute in middle: • Match boundary conditions at = 0 • And substitute in:
Sample Problem 11.8 (3) Find the general motion of a particle of mass m moving in a constant magnetic field , if it starts at the origin of space and time at = 0 with velocity v. • Recall that • So we just integrate these equations: • Subject to boundarycondition x(0) = 0 • If we want, we rewrite in terms of t
Gauge Transformations and Gauge Choice • A gauge transformation is any change of the form • Let’s try to write this in a covariant manner: • Gauges are not necessarily Lorentz invariant • Coulomb gauge, for example • Lorentz gauge, in contrast,is Lorentz invariant • In Lorentz gauge, we found • With a little work, these canbe combined to yield
Rewriting Solution in Lorentz Gauge (1) • This has integral over space, but not over time • To make it look more four-dimensional, add a time integral: • Now, recall for any -function • Applying this to t', we have • We therefore have: • Needed to restrict t' < t to make sure we get correct root in delta function
Rewriting Solution in Lorentz Gauge (2) • This is almost manifestly Lorentz covariant • Though this isn’t manifestly Lorentz covariant, it is Lorentz covariant • The delta function restricts x' to the light cone of the point x • Together with the Heaviside function, it refers to the past light cone of x
11D. Lorentz Transformations in E and M It’s Not Complicated • We know how to transform anything • Suppose we have a four-current • Consider a boost in the x-direction • As viewed by the moving observer, we have • Write it all out: • In a general direction, this becomes • Don’t forget we must rotate coordinates too!
Lorentz Boost of EM-Fields • Consider an x-boost of the EM fields • Let’s work them out one at in massive parallel
Sample Problem 11.9 (1) [formerly 6.1] A point charge q moves along the z-axis at velocity v. Find the fields everywhere. • Let use move to a primed coordinate system,moving along with the particle at velocity v • For this observer, the fields are • Write E' in cylindrical coordinates • Now, perform a Lorentz boost by –v, back along the z-axis