Download
1 / 26
310 likes | 630 Views
PolyMUMPS Flexure Design. Garet Kim Jessica McAlister Lydia Tse. Overview. Project Goal Design Background Pulling Mechanism Conclusion. Project Goal. 1) A folding/extending stage is to be designed using flexure joints. 2) Produce predictable movement with the zero-backlash flexure.

E N D
PolyMUMPS Flexure Design Garet Kim Jessica McAlister Lydia Tse
Overview • Project Goal • Design Background • Pulling Mechanism • Conclusion
Project Goal 1) A folding/extending stage is to be designed using flexure joints. 2) Produce predictable movement with the zero-backlash flexure. 3) Create a test bench of flexure designs
Flexures: Advantages • Simple and inexpensive to manufacture • Virtually no irreversible deformations • Displacements are smooth and continuous • Predictable, repeatable motions • (even at atomic resolution) • Linear relationship between applied force and displacement for small distortions
Types of Flexures Leaf Hinge Notch HInge Distributes deflection over length of hinge -lower stress -higher deflection to beam length ratio More immune to parasitic forces
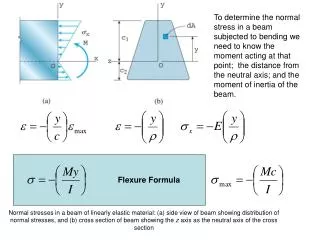
Predicting Motion • Simple application of bending theory:
Our Design • Basic flexure (single or cascaded) • H flexure (single or cascaded) • Buckling flexure
JOINT DESIGN NECK DESIGN AND LENGTH NUMBER OF FLEXURES IN CASCADE BEAM WIDTH BEAM LENGTH AND BEAM RATIO Our Design • Test bench: To study the effects of varying different design properties • 50 + variations
Beam (Poly1) Length: 60 um, 88 um, 90 um, 120 um, 168 um, 180 um, 248 um, 330 um, 660 um Width: 8 um, 12 um Ratio: 1 to 1, 1 to 3, 1 to 5, 2 to 1, 3 to 1, 5 to 1, 10 to 1 Basic Flexure Beam Length: 60 um Beam Width: 12 um Beam Ratio: 1 to 1 Neck Length: 5 um Anchor (Poly1 encloses Anchor1) Neck (Poly1) 1 um, 5 um, 9 um, 11 um, 13 um 33 um, 41 um, 49 um
Basic Flexure Samples: Beam Length: 90 um Beam Width: 12 um Beam Ratio: 2 to 1 Neck Length: 13 um Beam Length: 180 um Beam Width: 12 um Beam Ratio: 5 to 1 Neck Length: 49 um Beam Length: 168 um Beam Width: 8 um Beam Ratio: 3 to 1 Neck Length: 1 um Beam Length: 330 um Beam Width: 12 um Beam Ratio: 10 to 1 Neck Length: 33 um
Cascaded Basic Flexure • Linear (longitudinal) combinations of multiple basic flexures • Result in increasingly smaller / bigger movements than single basic flexure Beam Length / Flexure: 248 um Beam Width / Flexure: 8 um Beam Ratio / Flexure: 5 to 1 Number of Flexures in Cascade: 3 Type of Joint Used: Spring #3
Beam Length / Flexure: 168 um Beam Width / Flexure: 8 um Beam Ratio / Flexure: 3 to 1 Number of Flexures in Cascade: 2 Type of Joint Used: Spring #1 Number of Flexures in Cascade: 2, 3 Joint between 2 Flexures (Poly1) Beam Length per Flexure: 168 um, 248 um Beam Width per Flexure: 8 um Beam Ratio per Flexure: 1 to 3, 3 to 1, 1 to 5, 5 to 1 Spring #1 Spring #2 Spring #3 Flexure
Connection Between Flexures • Prevents shear effects at the tip • Experimental. 4 kinds of connections (Flexure, 3 different springs
‘H’ Flexure • Linear (both transverse and longitudinal) combinations of basic flexures • Transversely join two flexures at their anchors • Longitudinally join flexures as in cascaded basic flexures discussed in the previous section • Do not result in longitudinal movements Beam Length / Flexure: 660 um Beam Width / Flexure: 12 um Beam Ratio / Flexure: 10 to 1 Number of Flexures in Cascade: 4 Type of Joint Used: Spring #3
‘H’ Flexure Beam Length / Flexure: 660 um Beam Width / Flexure: 12 um Beam Ratio / Flexure: 10 to 1 Number of Flexures in Cascade: 8 Type of Joint Used: Flexure Beam Length / Flexure: 660 um Beam Width / Flexure: 12 um Beam Ratio / Flexure: 10 to 1 Number of Flexures in Cascade: 4 Type of Joint Used: Spring #1
Buckling Flexure • Buckling should be avoided? Why? • Disadvantage: Tricky to get the output, need much more force to operate than basic shapes. • Advantage: Various transfer characteristics, most likely linear, and NEW !
Pulling Mechanism • Pull-rings • Ad: Simple, guaranteed to work, easy operation • Dis: Inaccurate movements, low precision, relatively large
Pulling Mechanism • Heatuators • Ad: Relatively simple, high precision and accuracy in movement, practical • Dis: Small range of movement, need a bank of them to work with flexures, occupy a larger area than a pull-ring
Pulling Mechanism • Linear Stepper Motor • Ad: Large range of operation, practical • Dis: complicated, large units of movement, significant real estate required
Test Bench • Our designs are placed to test effects caused by different shapes or parameters of flexures. • Example (Single basic with a regular neck)
Conclusion • Hope all the flexures work as predicted. Let’s cross our fingers! • Hope our flexures would provide insights for future designs that can produce precise movements on the angstrom scale. • Any Questions?