Download
1 / 32
330 likes | 609 Views
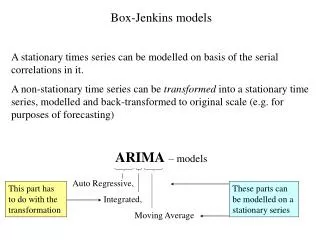
Auto-regressive dynamical models . Continuous form of Markov process Linear Gaussian model Hidden states and stochastic observations (emissions) Statistical filters: Kalman, Particle EM learning Mixed states. Auto-regressive dynamical model . Configuration AR model

E N D
Auto-regressive dynamical models • Continuous form of Markov process • Linear Gaussian model • Hidden states and stochastic observations (emissions) • Statistical filters: Kalman, Particle • EM learning • Mixed states
Auto-regressive dynamical model • Configuration • AR model • Parametric shape/texture model, • eg curve model: ARP order driven by independent noise possibly nonlinear
Deformable curve model curve model: Planar affine + learned warps Active shape models (Cootes&Taylor, 93) Residual PCA (“Active Contours”, Blake & Isard, 98) Active appearance models (Cootes, Edwards &Taylor, 98)
Linear AR model (“Active Contours”, Blake and Isard, Springer 1998) • Configuration • Linear Gaussian AR model • Prior shape • “Steady state” prior (1st order)
Gaussian processes for shape & motion intra-class single object (Reynard, Wildenberg, Blake & Marchant, ECCV 96)
Kalman filter (Gelb 74) • Stochastic observer • Kalman filter (Forward filter) • Kalman smoothing filter (Forward-Backward) independent noise also etc.
Particle Filter: Non-Gaussian Kalman filter www.research.microsoft.com/~ablake/talks/MonteCarlo.ppt
Particle Filter (PF) continue
“JetStream”: cut-and-paste by particle filtering • particles “sprayed” along the contour
Propagating Particles • particles “sprayed” along the contour • contour smoothness prior
Direct observations: “Classic” Yule-Walker • Learn parameters • by maximizing: • which for linear AR process minimizing • Finally solve: • where “sufficient statistics” are: MLE Learning of a linear AR Model
Handwriting “Scribble” -- simulation of learned ARP model -- disassembly
Simulation of learned Gait -- simulation of learned ARP model
Walking Simulation (ARP + HMM) (Toyama & Blake 2001)
Dynamic texture (S. Soatto, G. Doretto, Y. N. Wu, ICCV 01; A. Fitzgibbon, ICCV01)
Speech-tuned filter (Blake, Isard & Reynard, 1985)
EM learning • Stochastic observations z: unknown -- hidden unavailable – classic EM: • M-step i.e. • E-step FB smoothing
PF: forward-backward continue
Learned Dynamics of Juggling State lifetimes and transition rates also learned
Perception and Classification Ballistic (left) Catch, carry, throw (left)
Learning Algorithms EM-P
1D Markov models • 1D Markov models • 2D Markov models
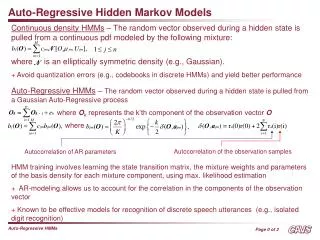
EM-PF Learning • Forward-backward particle smoother (Kitagawa 96, Isard and Blake, 98) for non-Gaussian problems: • Generates particles with weights • Autocorrelations: • Transition Frequencies: