Download
1 / 20
• 200 likes • 536 Views
2004 International CVT Congress, CA, USA. On the operating regime of metal pushing V-belt CVT under steady-state microslip conditions. SAE #: 2004-34-2851. Nilabh Srivastava Imtiaz Haque Department of Mechanical Engineering Clemson University September 24, 2004.

E N D
2004 International CVT Congress, CA, USA On the operating regime of metal pushing V-belt CVT under steady-state microslip conditions SAE #: 2004-34-2851 Nilabh Srivastava Imtiaz Haque Department of Mechanical Engineering Clemson University September 24, 2004
Introduction to CVT (Continuously Variable Transmission) Research Objective Literature Review Model Development Results Conclusion Future Work & Recommendations Presentation Outline
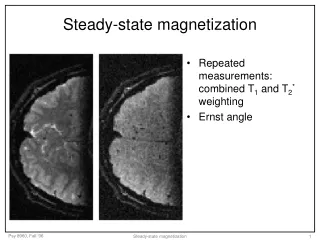
Introduction Metal belt structure Metal V-belt CVT
Research Objective Research Focus: • Develop model to capture dynamic interactions in a metal V-belt CVT under • steady state microslip conditions • Study the influence of loading conditions (torque and forces) on belt slip • Study belt slip behavior under microslip conditions i.e. due to gap between • belt elements • Investigate operating regime of the CVT for efficient torque transmission (i.e. • meeting the load requirements) • Predict torque transmitting capacity of the CVT Research Support: US ARMY TACOM
Literature Review • Related to Slip models & Operating Regime • Gerbert, G., ‘Belt Slip – A unified approach’, ASME J. of Mechanical Design, Vol. 118, 1996 • Sun, D. C., ‘Performance analysis of a variable speed-ratio metal V-belt drive’, Transactions of ASME, Mechanisms, Transmission, and Automotive Design, 110, 1988 • Micklem, J. D.. et al, ‘Modeling of the steel pushing V-belt continuously variable transmission’,Proceedings Inst. Of Mech. Eng., Vol. 208, 1994 • Carbone, G., et al, ‘Theoretical Model Of Metal V-Belt Drives During Ratio Changing Speed’, ASME Journal of Mechanical Design, Vol. 123, 2000 • Kobayashi D., Mabuchi Y., Katoh Y., ‘A Study on the Torque Capacity of a Metal Pushing V-Belt for CVTs’, SAE Paper 980822, Transmission and Driveline Systems Symposium, 1998 • Srivastava,N., Haque, I., “On the transient dynamics of a metal pushing V-belt CVT at high speeds”, International J. of Vehicle Design, (accepted March 2004) • Srivastava,N., Blouin, V., Haque, I., “Using Genetic Algorithms to identify initial operating conditions for a transient CVT model”, 2004 ASME IMECE, Nov 13-19, 2004 (accepted)
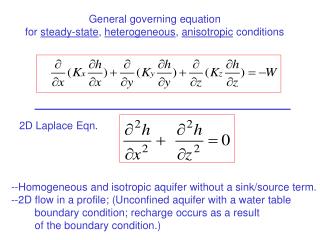
Model Development Assumptions: • The pulleys are rigid and there is no misalignment between them • Elements and bands are treated as a continuous belt • The center of mass of the element and that of the band pack coincide • Belt length is constant • Impending slip conditions exist at all contact surfaces • Bending and torsional stiffness of the belt are neglected • The element dimensions are small in comparison to the pulley radii • The total gap between the elements is distributed uniformly in the region of zero or very low compression in the belt
êr dF êt a dF d Model Development Free Body Diagrams: T+dT T Driven Band pack
Model Development Free Body Diagrams: Driven Element
b dN sin Element dN Shaft Axis dF z Pulley Sheave Model Development Free Body Diagrams: Forces of belt element on DRIVEN pulley • Free body diagrams of the two pulleys yield torque equations
Model Development Elemental Gap and Slip: Redistribution of elemental gap • Belt microslip is defined on the basis of mean gap [ Kobayashi,1998 ]
Half sheave angle, 15 deg Band pack density, b 3.5 kg/m Element density, e 3 kg/m Belt pretension, To 400 N Driver pulley speed, 500 rpm Center distance, d 0.5 m Coefficient of friction, 0.15 Coefficient of friction, 0.15 Results SimulationParameters
Results Belt Compressive Force Profile
Results Transmission ratio vs. Driver axial Force (5 Nm)
Results Transmission ratio vs. Driver axial Force (30 Nm)
Results Transmission ratio vs. Maximum Load Torque
Results Driver side belt slip vs. Driver axial force
Results Driver side belt slip vs. Driven axial force
Results Driver side belt slip vs. Input Torque
Dynamic interactions were noted under steady state microslip conditions Belt slip was calculated on the basis of gap redistribution Belt slip is influenced by loading conditions of torques and forces Operating regime could be identified for a given CVT configuration and specified loading conditions, under the assumption of microslip and quasi-static variation in transmission ratio Increasing torque on one of the pulleys increases slip on that pulley, provided loading conditions on the other pulley are kept constant Increasing axial force on one of the pulleys reduces slip on that pulley, provided loading conditions on the other pulley are kept constant Maximum transmittable torque can be estimated just before the belt undergoes gross slip Conclusions
Belt can undergo both macro and micro slip, so the operating regime should be estimated by taking inertial effects into account besides the loading effects – Srivastava,N., Blouin, V., Haque, I., “Using Genetic Algorithms to identify initial operating conditions for a transient CVT model”, 2004 ASME IMECE, Nov 13-19, 2004 (accepted) Belt slip is not only influenced by loading conditions of torques and forces, but also by inertial effects => The assumption of constant sliding angle over the pulley wrap is violated at high speed variations - Srivastava,N., Haque, I., “On the transient dynamics of a metal pushing V-belt CVT at high speeds”, International J. of Vehicle Design, (accepted March 2004) The friction between individual bands in the band pack have been neglected. However, it is presumed that it will not significantly cause shifts in the operating regime of the CVT. Kim H., Lee J., ‘Analysis of Belt Behavior and Slip Characteristics for a Metal V-belt CVT’, Mechanism & Machine Theory,1994 Friction between the surfaces can also be modeled using elastohydrodynamic lubrication theory Flexural effects have been neglected. However, at high speeds and under high loading conditions, the pulley sheaves can undergo flexural vibrations, thereby, influencing operating regime of the CVT Real-world experiments need to be run on a CVT for verifying the consistency of operating regime obtained from the simulation model. However, the results of the model are in consonance with those obtained under conditions of no-load (i.e.Kobayashi,D., SAE Paper 980822, 1998) Future Work & Recommendations