Download
1 / 31
• 310 likes • 450 Views
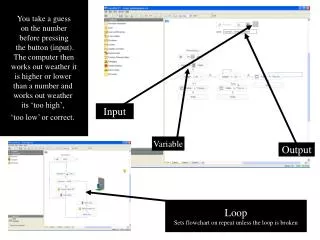
This system incorporates sensors, conversion elements, and signal processing to convert energy or information from a measurand into a perceptible output, enabling humans to perceive data. It includes elements like control, feedback, power sources, and data transmission for accurate measurement and calibration. Measurands vary from physical quantities to chemical concentrations, with transducers converting energy forms for electrical output. The system operates in direct and indirect modes, connecting with living systems, and minimizing invasive procedures. Instrument performance evaluation considers static and dynamic characteristics like accuracy, precision, resolution, and reproducibility. Static sensitivity analysis leads to statistical control, sensitivity drift, and zero drift for optimal instrument operation. Linearity and input impedance play crucial roles in maintaining accurate measurements.

E N D
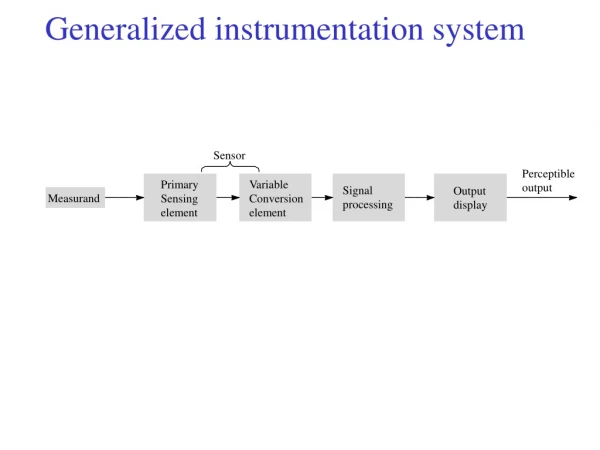
Sensor Perceptible output Primary Sensing element Variable Conversion element Signal processing Output display Measurand Generalized instrumentation system
Control And feedback Power source Sensor Perceptible output Primary Sensing element Variable Conversion element Signal processing Output display Measurand Data transmission Calibration Data storage signal Generalized instrumentation system
Figure 1.1 The sensor converts energy or information from the measurand to another form (usually electric). This signal is the processed and displayed so that humans can perceive the information. Elements and connections shown by dashed lines are optional for some applications. Control And feedback Power source Sensor Perceptible output Primary Sensing element Variable Conversion element Signal processing Output display Measurand Data transmission Calibration Data storage signal Radiation, electric current, or other applied energy Generalized instrumentation system Eg. Heart beats
Biopotential Pressure Flow Dimensions (imaging) Displacement (velocity, acceleration, force) Impedance Temperature Chemical Concentration Measurand: Physical quantity
Transducer Converts one form of energy to another Sensor Converts a physical measurand to an electrical output Interface with living system Minimize the energy extracted Minimally invasive Sensor and Transducer displacement electric voltage Strain gage pressure diaphragm
Amplification Filtering Impedance matching Analog/Digital for signal processing Signal form (time and frequency domains) Signal Conditioning
Numerical Graphical Discrete or continuous Visual Hearing Output Display
Calibration Signal Control and Feedback (auto or manual) Adjust sensor and signal conditioning Auxiliary Element
Direct Mode: Measurand is readily accessible Temperature Heart Beat Indirect Mode: desired measurand is measured by measuring accessible measurand. Morphology of internal organ: X-ray shadows Volume of blood pumped per minute by the heart: respiration and blood gas concentration Pulmonary volumes: variation in thoracic impedance 1.3 Alternative Operational Modes
Characteristics of Instrument Performance • Two classes of characteristics are used to evaluated and compare new instrument • Static Characteristics: describe the performance for dc or very low frequency input. • Dynamic Characteristics: describe the performance for ac and high frequency input.
1.9 Generalized Static Characteristics • Parameters used to evaluate medical instrument: • Accuracy: The difference between the true value and the measured value divided by the true value • Precision: The number of distinguishable alternatives from which a given results is selected {2.434 or 2.43} • Resolution: The smallest increment quantity that can be measured with certainty • Reproducibility: The ability to give the same output for equal inputs applied over some period of time.
1.9 Generalized Static Characteristics • Parameters used to evaluate medical instrument: • Statistical Control: Systematic errors or bias are tolerable or can be removed by calibration. • Statistical Sensitivity: the ratio of the incremental output quantity to the incremental input quantity, Gd.
Zero Drift: all output values increase or decrease by the same amount due to manufacturing misalignment, variation in ambient temperature, vibration,…. Sensitivity Drift: Output change in proportion to the magnitude of the input. Change in the slope of the calibration curve. Figure 1.3 (b) Static sensitivity: zero drift and sensitivity drift. Dotted lines indicate that zero drift and sensitivity drift can be negative.
Linearity Independent nonlinearity - A% deviation of the reading - B% deviation of the full scale (x1 + x2) x1 y1 (y1 + y2) Linear Linear system system and and Kx1 Ky1 x2 y2 Linear Linear system system (a) Least-squares straight line y (Output) B% of full scale A% of reading Overall tolerance band Figure 1.4 (a) Basic definition of linearity for a system or element. The same linear system or element is shown four times for different inputs. (b) A graphical illustration of independent nonlinearity equals A% of the reading, or B% of full scale, whichever is greater (that is, whichever permits the larger error). xd (Input) Point at which Input Ranges (I): Minimum resolvable input < I < normal linear operating range A% of reading = B% of full scale (b)
Example A linear system described by the following equation y=2x+3. Find the overall tolerance band for the system if the input range is 0 to 10 and its independent nonlinearity is 0.5% deviation of the full scale and 1.5% deviation of the reading.
Input Impedance: • disturb the quantity being measured. • Xd1 : desired input (voltage, force, pressure) • Xd2 : implicit input (current, velocity, flow) • P = Xd1.Xd2 :Power transferred across the tissue-sensor interface • Generalized input impedance Zx • Goal: Minimize P, when measuring effort variable Xd1, by maximizing Zx which in return will minimize the flow variable Xd2. • Loading effect is minimized when source impedance Zs is much smaller then the Zx
1.10 Generalized Dynamic Characteristics Most medical instrument process signals that are functions of time. The input x(t) is related to the output y(t) by ai and bi depend on the physical and electrical parameters of the system. Transfer Functions The output can be predicted for any input (transient, periodic, or random)
Frequency Transfer Function Can be found by replacing D by j Example: If x(t) = Ax sin (t) then y(t) = |H()| Ax sin (t + /_H())
Zero-Order Instrument a0 y(t) = b0x(t) K: static sensitivity Figure 1.5 (a) A linear potentiometer, an example of a zero-order system. (b) Linear static characteristic for this system. (c) Step response is proportional to input. (d) Sinusoidal frequency response is constant with zero phase shift.
First-Order Instrument Where is the time constant
First-Order Instrument Output y(t) R + + Slope = K = 1 C x(t) y(t) - - Input x(t) (a) (b) Log Y (jw) x(t) scale X (jw) 1 1.0 S 0.707 L wL wS Log scale w t (c) (d) f y(t) 0° 1 S Log scale w L 0.63 - 45° -90° S L t Example 1.1: High-pass filter
Second-Order Instrument Many medical instrument are 2nd order or higher Operational Transfer Function Frequency Transfer Function
2nd order mechanical force-measuring Instrument Output displacement Input Force x(t) 0 y(t) Output y ( t ) 1 Slope K = Ks (a) Input x(t) (b) Resonance Y (jw) x(t) Log X (jw) scale K 1 0.5 2 1 wn Log scale w t (c) (d) f wn y(t) Log scale w 0° yn yn + 1 0.5 2 1 1 Ks -90° 0.5 1 2 -180° t B = viscosity constant Ks = spring constant Natural freq. Damping ratio Figure 1.7 (a) Force-measuring spring scale, an example of a second-order instrument. (b) Static sensitivity. (c) Step response for overdamped case = 2, critically damped case = 1, underdamped case = 0.5. (d) Sinusoidal steady-state frequency response, = 2, = 1, = 0.5.
Overdamped Critically damped Underdamped y(t) 1 Ks 0.5 Damped natural freq. t
Example 1.2: for underdamped second-order instruments, find the damping ratio from the step response and Logarithmic decrement
Time Delay System Log Y (jw) scale K X (jw) Log scale w f Log scale w 0°
Design Criteria Figure 1.8 Design process for medical instruments Choice and design of instruments are affected by signal factors, and also by environmental, medical, and economic factors.
Commercial Medical Instrumentation Development Process • Ideas: come from people working in the health care • Detailed evaluation and signed disclosure • Feasibility analysis and product description • Medical need • Technical feasibility • Brief business plan (financial, sales, patents, standards, competition) • Product Specification (interface, size, weight, color) • “What” is required but nothing about “how” • Design and development (software and hardware)
Commercial Medical Instrumentation Development Process • Prototype development • Testing on animals or human subjects • Final design review (test results for, specifications, subject feedback, cost) • Production (packaging, manual and documents) • Technical support
Regulation of Medical Devices Medical devices is “any item promoted for a medical purpose that does not rely on chemical action to achieve its intended effect” 2 Ways for Medical Devices Classification First Way: (based on potential hazards) Class I: general controls Class II: performance standards Class III: premarketing approval Second Method: (see Table 1.2 in textbook) preamendment, postamendment, substantially equivalent, implant, custom, investigational, transitional
Regulation of Medical Devices Second Way of classifications: (see Table 1.2 in textbook) Preamendment: Devices on the market before 5/28/1976 Postamendment: Devices on the market after 5/28/1976 Substantially equivalent: Equivalent to preamendment devices Implant: devices inserted in human body and intended to remain there for >30 days. Custom: Devices not available to other licensed and not in finished form Investigational: Unapproved devices undergoing clinical investigation Transitional: devices that were regulated as drugs and now defined as medical devices