Download
1 / 14
150 likes | 368 Views
CM613 Multimedia storage and retrieval Content-based image retrieval. D.Miller. Fundamental problem of search by machine v. search by a person. Sensory gap Gap between the “object in the world” and its digital representation Semantic gap

E N D
CM613 Multimedia storage and retrievalContent-based image retrieval D.Miller
Fundamental problem of search by machine v. search by a person • Sensory gap • Gap between the “object in the world” and its digital representation • Semantic gap • Gap between information that a machine extract from the image and what the the image means to someone.
Heirinymus Bosch: The Garden of Earthly Delights (detail from the panel “Hell”) • Hieronymus, or Jerome, Bosch, b. c.1450, d. August 1516, spent his entire artistic career in the small Dutch town of Hertogenbosch, from which he derived his name. • At the time of his death, Bosch was internationally celebrated as an eccentric painter of religious visions who dealt in particular with the torments of hell.
Statistical Techniques: colour histogram • Basically just a count of how many pixels of each (R, G and B) value are present • Positive • Not sensitive to orientation • Negative • Spatial information is lost. http://www.cultivate-int.org/issue7/artiste/
Statistical Techniques: Colour layout • Divides an image into a grid and searches for similar colours in equivalent grid position. • E.g blue sky
Statistical Techniques: texture • Using orientation and spacing of edges • Also a histogram of edge features can be used • Also texture layout (as colour layout) http://www.cultivate-int.org/issue7/artiste/
Techniques: searching for an object • Much more difficult than previous techniques http://www-rocq.inria.fr/~gouet/HCP/index.htm l
C-Bird case study • Content-Based Image Retrieval from Digital Libraries • Colour histogram • Colour Density • Colour layout • Texture layout • Illumination invariance • Object model
C-Bird case study: Colour histogram • “coarse” histogram • 3 bits for red • 3 bits for green • 2 bits for blue • Giving 256 “bins” for the histogram. • Returns matches above a threshold, rather top few matches • So sometimes may return nothing. • Similarity is measured by histogram intersection • A histogram is generated for each image in the database • Each histogram is a sequence of numbers • Each value is divided by the sum of all the values in the histogram to remove the size of the image as a factor (normalisation). • The histogram is stored in the database. • When a comparison of two histograms is made, the minimum value of equivalent bins is summed for all the bins. The closer the sum is to 1, the better the match.
C-Bird case study: Colour layout • User sets up a scheme of how colour should appear • Coarse blocks of colour in grid sizes 1x1, 2x2, 4x4, 8x8. • Cells can be specified with any RGB colour value or not. If no value is specified that grid is ignored in the search. • Each image in the database is analysed for each of the 4 grid sizes and the 5 most frequent colours in each cell are stored.
C-Bird case study: Texture layout • User sets up a scheme of how colour should appear • Coarse blocks grid sizes 1x1, 2x2, 4x4, 8x8. • Cells can be specified with pre-defined textures, such as: • Comparison can then be carried out in a way analogous to colour layout..
C-Bird case study: Illumination invariance • Differences in illumination of an image can lead to RGB sensors picking up different colour values – pink under daylight might be detected as purple under fluorescent lighting, for example. • It is desirable to remove the effect of differences in illumination from image when searching. • This is dealt with by: • normalising each of the RGB bands of the image (analogous to the way normalisation was used with colour histogram), • Creating a 128x128 colour histogram of chromaticity (capturing only colour information, not brightness).
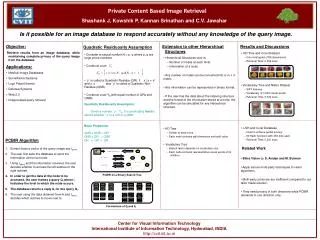
C-Bird case study: search by object model • This is described by Li and Drew as “the most important search type C-BIRD” supports. • The user picks a sample image and interactively selects a region for object searching – “object query-by-example”. • Uses technique of “feature localization” as opposed to “image segmentation”. • Both use concept of “tiles” • However “locales” are: • collections of tiles that share similar features • and can be found in a an area of the image, • but need not necessarily be contiguous (they can be scattered about a bit) • Li and Drew outline a combination of techniques for creating the tile and locale features from raw image data.
Sources • Li and Drew (2004) Fundamentals of Multimedia (module recommended book) • http://www.cs.sfu.ca/cbird/ (demonstration site for C-BIRD) • Addis,M. Lewis, P. and Martinez, K. (2002) ARTISTE image retrieval system puts European galleries in the picture. http://www.cultivate-int.org/issue7/artiste/ (Accessed 4/05/06)