Download
1 / 44
440 likes | 641 Views
Clustering Trajectories of Moving Objects in an Uncertain World. Nikos Pelekis 1 , Ioannis Kopanakis 2 , Evangelos E. Kotsifakos 1 , Elias Frentzos 1 , Yannis Theodoridis 1. IEEE International Conference on Data Mining (ICDM 2009), Miami, FL, USA, 6-9 December, 2009. Outline. Related work

E N D
Clustering Trajectories of Moving Objects in an Uncertain World Nikos Pelekis1, Ioannis Kopanakis2, Evangelos E. Kotsifakos1, Elias Frentzos1, Yannis Theodoridis1 IEEE International Conference on Data Mining (ICDM 2009), Miami, FL, USA, 6-9 December, 2009
Outline • Related work • Motivation • Our contribution • From Trajectories to Intuitionistic Fuzzy Sets • A similarity metric for Uncertain Trajectories (Un-Tra) • Cen-Tra: The Centroid Trajectory of a bunch of trajectories • TR-I-FCM: A novel clustering algorithm for Un-Tra • Experimental study • Conclusions & future work Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Related Workon Mobility Data Mining Trajectory clustering
Trajectory Clustering • Questions: • Which distance between trajectories? • Which kind of clustering? • What is a cluster ‘mean’ or ‘centroid’? • A representative trajectory? Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
ò t t d ( ( t ), ( t )) dt 1 2 t t = D ( , ) | T 1 2 T | T | Which distance? • Average Euclidean distance • “Synchronized” behaviour distance • Similar objects = almost always in the same place at the same time • Computed on the whole trajectory • Computational aspects: • Cost = O( |1| + |2| ) (|| = number of points in ) • It is a metric => efficient indexing methods allowed, e.g. [Frentzos et al. 2007] • Timeseries-based approaches: LCSS, DTW, ERP, EDR • Trajectory-oriented approach: • (time-relaxed) route similarity vs. (time-aware) trajectory similarity and variations (speed-pattern based similarity; directional similarity; …) [Pelekis et al. 2007] distance between moving objects 1 and 2 at time t Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Which kind of clustering? K-means HAC-average T-OPTICS [Nanni & Pedreschi, 2006] Reachability plot (= objects reordering for distance distribution) threshold Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
TRACLUS: A Partition-and-Group Framework [Lee et al. 2007] Discovers similar portions of trajectories (sub-trajectories) Two phases: partitioning and grouping Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
What about usage of Mobility Patterns? Visual analytics for mobility data
Visual analytics for mobility data [Andrienko et al. 2007] • What is an appropriate way to visualize groups of trajectories? Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Summarizing a bunch of trajectories 1) Trajectories sequences of “moves” between “places” 2) For each pair of “places”, compute the number of “moves” 3) Represent “moves” by arrows (with proportional widths) Many small moves Major flow Minor variations Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Motivation • Challenge 1: Introduce trajectory fuzziness in spatial clustering techniques • The application of spatial clustering algorithms (k-means, BIRCH, DBSCAN, STING, …) to Trajectory Databases (TD)is not straightforward • Fuzzy clustering algorithms (Fuzzy C-Means and its variants) quantify the degree of membership of each data vector to a cluster • The inherent uncertainty in TD should taken into account. • Challenge 2: study the nature of the centroid / mean / representative trajectory in a cluster of trajectories. • Is it a ‘trajectory’ itself? Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Our contribution • I-Un-Tra: An intuitionistic fuzzy vector representation of trajectories • enables clustering of trajectories by existing (fuzzy or not) clustering algorithms • DUnTra: A distance metric of uncertain trajectories • Cen-Tra: The centroid of a bunch of trajectories • using density and local similarity properties • TR-I-FCM: A novel modification of FCM algorithm for clustering complex trajectory datasets • exploiting on DUnTra and Cen-Tra. Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
From Fuzzy sets to Intuitionistic fuzzy sets • Definition 1 (Zadeh, 1965). Let a set E be fixed. A fuzzy set on E is an object of the form • Definition 2 (Atanassov, 1986; Atanassov, 1994). An intuitionistic fuzzy set (IFS) A is an object of the form where where and Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Hesitancy • For every element • The hesitancy of the element x to the set A is Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Vector representation of trajectories • Assume a regular grid G(mn) consisting of cells ck,l , a trajectory and a target dimension p << ni, • The “approximate trajectory” consists of p regions (i.e. sets of cells) crossed by Tiduring period pj • The “Uncertain Trajectory” is theε-buffer of Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Intuitionistic UncertainTrajectories • membership = inside cell with 100% probability (i.e. thick portions) • non-membership = outside cell with 100% probability (i.e. dotted portions) • hesitancy = ignorance whether inside or outside the cell(i.e. solid thin portions) A cell ck.l ck.lε Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Intuitionistic UncertainTrajectories Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Proposed similarity metric (1/2) • The distance between two I-UnTraA and B is: where and Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Assuming two intuitionistic fuzzy sets on it, A= (MA, ΓA, ΠA)and B= (MB, ΓB, ΠΒ), with the same cardinality n, the similarity measure Z between A and B is given by the following equation: where z(A’,B’) for fuzzy sets A' and B' (e.g. for MA, MB) is defined as: and similarly for ΓA, ΓB and ΠA, ΠB. Proposed similarity metric (2/2) Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
The Centroid Trajectory • The idea (similarity-density-based approach): • adopt some local similarity function to identify common sub-trajectories (concurrent existence in space-time), • follow a region growing approach according to density Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Algorithm CenTra: An example T1 T2 Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World" T3
The Centroid Trajectory T1 T2 Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World" T3
Fuzzy C-Means algorithm • The FCM objective function: • Given that to be minimized requires: and • 1. Determine c (1 < c < N), and initialize V(0), j=1, • 2. Calculate the membership matrix U(j), • 3. Update the centroids’ matrix V(j), • 4. If |U(j+1)-U(j)|>ε then j=j+1 and go to Step 2. Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
CenTR-I-FCM algorithm • The FCM objective function: • Given that to be minimized requires : and Ignore update centroid step and instead use CenTra • 1. V(0) = c random I-UnTra; j=1; • 2. repeat • 3. Calculate membership matrix U(j) • 4. Update the centroids’ matrix V(j) using CenTra; • 5. Compute membership and non-membership degrees of V(j) • 6. Until ||Uj+1-Uj||F≤ε; j=j+1; Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Experiments (1/2) • Dataset: ’Athens trucks’ MOD (www.rtreeportal.org) • 50 trucks, 1100 trajectories, 112.300 position records Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Experiments (2/2) • Use CommonGIS [Andrienko et al., 2007] to identify real clusters “Round trips” clusters “Linear” clusters Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Results (Clustering accuracy scaling cell size, ε ) Fix density threshold to δ=2% of the total number of trajectories Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Results(Clustering accuracy scaling density threshold, δ) Fix uncertainty to ε=1 Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Results (scaling the number of clusters) Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Results (scaling the dataset cardinality) Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Results (Quality of CenTra) Representative Trajectories vs. Centroid Trajectories cell size=1.3%, ε=0,δ=0.09 cell size=1.3%, ε=0,δ=0.09, cell size=2.8%, ε=0,δ=0.02 Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Conclusions • We proposed a three-step approach for clustering trajectories of moving objects, motivated by the observation that clustering and representation issues in TD are inherently subject to uncertainty. • 1st step: an intuitionistic fuzzy vector representation of trajectories plus a distance metric consisting of • a metric for sequences of regions and • a metric for intuitionistic fuzzy sets • 2nd step: Algorithm CenTra, a novel technique for discovering the centroid of a bundle of trajectories • 3rd step: Algorithm CenTR-I-FCM, for clustering trajectories under uncertainty Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Future Work (@ ICDM time) • Exploit the metric properties of the proposed distance function by using an distance-based index structure(for efficiency purposes); • Perform extensive experimental evaluation using large trajectory datasets • Devise a clever sampling technique for multi-dimensional data so as to diminish the effect of initialization in the algorithm; • The last two have already been done in • N. Pelekis, I. Kopanakis, E. Kotsifakos, E. Frentzosand Y. Theodoridis. “Clustering Uncertain Trajectories”, Knowledge and Information Systems (KAIS), to appear. • N. Pelekis, I. Kopanakis, C. Panagiotakisand Y. Theodoridis. “Unsupervised Trajectory Sampling”, In the ECML PKDD 2010, Barcelona, Spain, 2010. to appear. Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Acknowledgements • Research partially supported by the FP7 ICT/FET Project MODAP (Mobility, Data Mining, and Privacy) funded by the European Union. URL: www.modap.org • a continuation of the FP6-14915 IST/FET Project GeoPKDD (Geographic Privacy-aware Knowledge Discovery and Delivery) funded by the European Union. URL: www.geopkdd.eu • Some slides are from: • Fosca Giannotti, Dino Pedreschi, and Yannis Theodoridis, “Geographic Privacy-aware Knowledge Discovery and Delivery”, EDBT Tutorial, 2009. Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
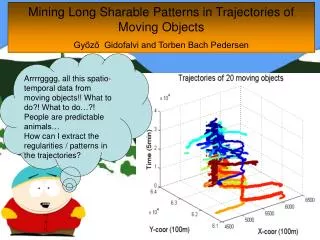
ε T δt Y X Examples of mobility patterns exploitation • Trajectory Density-based queries • Find hot-spots (popular places) [Giannotti et al. 2007] • Find T-Patterns [Giannotti et al. 2007] • Find hot motion paths [Sacharidis et al. 2008] • Find typical trajectories [Lee et al. 2007] • Identify flocks & leaders [Benkert et al. 2008] Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Which kind of clustering? • General requirements: • Non-spherical clusters should be allowed • E.g.: A traffic jam along a road = “snake-shaped” cluster • Tolerance to noise • Low computational cost • Applicability to complex, possibly non-vectorial data Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Different time intervals can show different behaviours E.g.: objects that are close to each other within a time interval can be much distant in other periods of time The time interval becomes a parameter E.g.: rush hours vs. low traffic times Already supported by the distance measure Just compute D(1 , 2) |T on a time interval T’ T Problem: significant T’ are not always known a priori An automated mechanism is needed to find them Temporal focusing Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
TRACLUS – representative trajectory • The representative trajectory of the cluster: • Compute the average direction vector and rotate the axes temporarily . • Sort the starting and ending points by the coordinate of the rotated axis. • While scanning the starting and ending points in the sorted order, count the number of line segments and compute the average coordinate of those line segments. Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Handling Uncertainty • Handling uncertainty is a relatively new topic! • A lot of research effort has been assigned • Developing models for representing uncertainty in trajectories. The most popular one [Trajcevski et al. 2004]: • a trajectory of an object is modeled as a 3D cylindrical volume around the tracked trajectory (polyline) • Various degrees of uncertainty Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Trajectory Uncertainty vs. Anonymization • Never Walk Alone [Bonchi et al. 2008] • Trade uncertainty for anonymity: trajectories that are close up the uncertainty threshold are indistinguishable • Combine k-anonymity and perturbation • Two steps: • Cluster trajectories into groups of k similar ones (removing outliers) • Perturb trajectories in a cluster so that each one is close to each other up to the uncertainty threshold Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World" 42
An example A={x, 0.4, 0.2}, B={x, 0.5, 0.3}, C={x, 0.5, 0.2} Cis more similar to A than B Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"
Qualitative evaluation of Z Pelekis et al. "Clustering Trajectories of Moving Objects in an Uncertain World"