Download
1 / 14
140 likes | 237 Views
IofT 1910 W Fall 2006 Week 3. Plan for today: discuss questions asked for the writeup talk about Brooks’ approach and compare it with other approaches talk about the lab on Thursday. Questions for writeup. What is the difference between a suppressor and an inhibitor? Why are both needed?

E N D
IofT 1910 W Fall 2006Week 3 Plan for today: discuss questions asked for the writeup talk about Brooks’ approach and compare it with other approaches talk about the lab on Thursday
Questions for writeup • What is the difference between a suppressor and an inhibitor? Why are both needed? • Explain in your own words what the modules in level 0 do. • What would be the effect of removing module runaway? • Explain how Level 1 is added to Level 0.
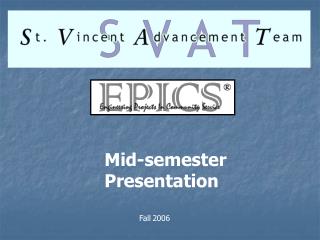
Decomposition of control Traditional architecture Brooks’ layered architecture From R. Brooks, “A robust layered control system for a mobile robot,” IEEE JRA, Vol 2, N 1, 1986
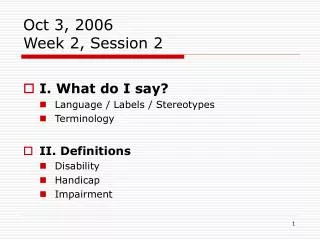
1. Suppressors and inhibitors From R. Brooks, “A robust layered control system for a mobile robot,” IEEE JRA, Vol 2, N 1, 1986
Answer: How do suppressors and inhibitors work? • There are two ways in which a signal can be suppressed: • Suppress the original signal and do not replace it. This is what an Inhibitor does when applied to an output. • Suppress the original signal and replace it with a different signal. This is what a Suppressor does when applied to an input. This is used when a higher-level module wants to inject its signal into a lower level module
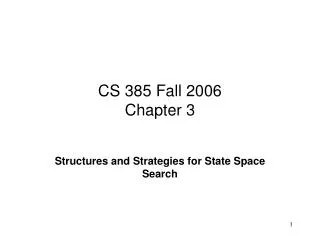
2. Modules in level 0 This figure is from an older version of the paper and is slightly different From R. Brooks, “A robust layered control system for a mobile robot,” IEEE JRA, Vol 2, N 1, 1986
Answer: what do modules in level 0 do? • sonar: takes sonar readings, filters out outliers, and produces a robot-centric map in polar coordinates. • feelforce: adds vectors of virtual forces computed from each sonar distance as (1/distance2). • runaway: monitors if force is above threshold and then sends heading to turn. • collide: sends halt command if it detects a close object in front of the robot. • turn and forward: communicate with the robot to turn and move. When the robot stops moving forward sends the shaft-encoder readings to turn and resets turn for the next motion.
Answer: Effect of removing module runaway • runaway makes the robot to move towards a place where the force on it is null (i.e. equidistant from all obstacles) when the force is above a threshold. This prevents the robot from jiggling. Without runaway the force vector will always be passed directly to turn.
4. How is Level 1 added to Level 0? From R. Brooks, “A robust layered control system for a mobile robot,” IEEE JRA, Vol 2, N 1, 1986
Answer: How is Level 1 added to Level 0 avoid gets force from level 0, combines it with desired heading from wander, and suppresses input from runaway into motor injecting its own heading. S/20 wander avoid From R. Brooks, “A robust layered control system for a mobile robot,” IEEE JRA, Vol 2, N 1, 1986
Compare Brooks’ approach to others: Traditional model • In the traditional model cognition mediates between perception and actions. • Actions affect the world • Perception gets information from the world to feed cognition
Brooks’ model • Cognition is in the eye of the observer. • Perception and action do all the work. • The world is its own best model. World Action Perception Cognition
Lab on Thursday • Where: in EE/CS 2-140 • You need your U card to get in. • We’ll continue using MEdit to write simple programs to get the AIBO to move. • You can bring your laptop and get help in setting up the software on your laptop.