Download
1 / 38
400 likes | 515 Views
UTAM Sponsor Meeting 2009. Velocity Analysis Using Shaping Regularization. Sergey Fomel. “ If I have seen a little further it is by standing on the shoulders of Giants. ”. February 5, 1676. Isaac Newton. Robert Hooke. s. e. Linearization. Hooke’s law elastic theory seismic waves

E N D
UTAM Sponsor Meeting 2009 Velocity Analysis Using Shaping Regularization Sergey Fomel
“If I have seen a little further it is by standing on the shoulders of Giants.” February 5, 1676 Isaac Newton Robert Hooke
s e Linearization • Hooke’s law • elastic theory • seismic waves • Newton’s method • gradient optimization • seismic tomography
The Marmousi experience (Versteeg, 1994)
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
Forward and Backward • m model (what we want to find) • d data (what we measure) • d = F[m] forward operator (accurate) • m0 = B[d] backward operator (affordable) • m = m + B[d] - BF[m] • mk+1 = mk + B[d] - BF[mk] • Landweber iteration (R-algorithm)
Sergey V. Goldin (1936-2007)
Landweber Iteration • mk+1 = mk + B[d] - BF[mk] • converges to the solution of B[d]=BF[m] if spectral radius (I-BF) < 1 • alternatively iteration in the data space dk+1 = dk + d - FB[dk] and mk= B[dk] “adding the noise back” (Osher et al., 2005)
Regularized Iteration • mk+1 = S[mk + B[d] - BF[mk]] • S shaping operator • Example: sparsity-constrained inversion • (Daubecheis et al., 2004) • Thresholding • ║d - F m ║2 + ║m║1 • m = S[m + B[d] - BF[m]] • m = [I + S (BF-I)]-1 SB[d]
Shaping Regularization • m = [I + S (BF-I)]-1 SB[d] • (Fomel, 2007; 2008) Shaping
Shaping versus Tikhonov/Bayes • m = [I + S (BF-I)]-1 SB d • m = M F* [F M F* +N]-1 d • S = [I+ M-1 ]-1 • B = F* N-1
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
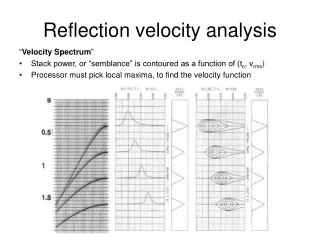
Toy problem • Model m • Data and forward operator d = F[m] • Backward operator m0 = B[d] • local slopes • Shaping operator S[m] • smooth models • blocky models
Forward Operator (Stoffa et al, 1982) q Dz
Predict each trace from its neighbor • Minimize prediction error (least squares) • Apply shaping regularization
Backward Operator (Fomel, 2007)
Backward Operator • Interval velocity as a data attribute! • T(t,p), v(t,p)
Assumptions 1-D no multiples no AVO Forward operator ray tracing Backward operator local slopes hyperbolic moveout Shaping operator smooth blocky Extensions 3-D waveform modeling stereoslopes anisotropy Toy problem
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
http://ahay.org Collaborative Research Environment • “Reproducible research” • Open source • Open community • Open science
The mission of ICES isto provide the infrastructure and intellectual leadership for developing outstanding interdisciplinary programs in research and graduate study in computational sciences and engineering. • multi-billion-dollar endowment • independent Board of Trustees • merit-based and open to men and women from around the world
Conclusions • Shaping regularization is a general framework for linear and nonlinear inverse problems. • Velocity analysis and velocity model building • Local slope estimation • Nonstationary matching filtering • Shared research environments enable world-wide collaboration and computational reproducibility. • “Standing on the shoulders of Giants” http://ahay.org