Download
1 / 1
10 likes | 163 Views
Assimilation of radar observations in mesoscale models using approximate background error covariance matrices. 1 UW-Madison AOS. Chang-Hwan Park 1 , Mark Kulie 1 and Ralf Bennartz 1. 3. HA Approximation. 1. Motivation. 6. Forecast Improvement. 1.. Introduction and Motivation.

E N D
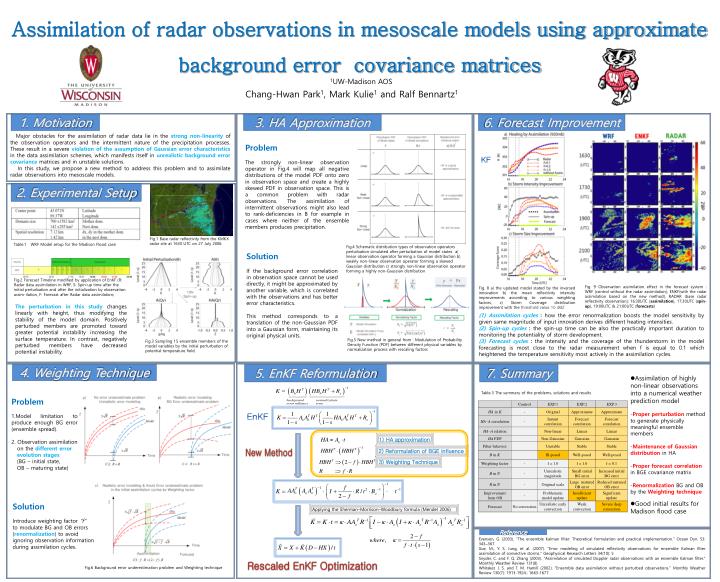
Assimilation of radar observations in mesoscale models using approximate background error covariance matrices 1UW-Madison AOS Chang-Hwan Park1, Mark Kulie1 and Ralf Bennartz1 3. HA Approximation 1. Motivation 6. Forecast Improvement 1.. Introduction and Motivation Major obstacles for the assimilation of radar data lie in the strong non-linearity of the observation operators and the intermittent nature of the precipitation processes. These result in a severe violation of the assumption of Gaussian error characteristics in the data assimilation schemes, which manifests itself in unrealistic background error covariancematrices and in unstable solutions. In this study, we propose a new method to address this problem and to assimilate radar observations into mesoscale models. Problem The strongly non-linear observation operator in Fig.4 will map all negative distributions of the model PDF onto zero in observation space and create a highly skewed PDF in observation space. This is a common problem with radar observations. The assimilation of intermittent observations might also lead to rank-deficiencies in B for example in cases where neither of the ensemble members produces precipitation. KF 2. Experimental Setup Fig.1 Base radar reflectivity from the KMKX radar site at 1630 UTC on 27 July 2006. Table.1 WRF Model setup for the Madison Flood case Fig.4 Schematic distribution types of observation operators perturbation simulated after perturbation of model states a) linear observation operator forming a Gaussian distribution b) weakly non-linear observation operator forming a skewed Gaussian distribution c) strongly non-linear observation operator forming a highly non-Gaussian distribution Solution If the background error correlation in observation space cannot be used directly, it might be approximated by another variable, which is correlated with the observations and has better error characteristics. This method corresponds to a translation of the non-Gaussian PDF into a Gaussian form, maintaining its original physical units. Fig.2 Forecast Timeline modified by application of EnKF (R: Radar data assimilation in WRF, S: Spin-up time after the initial perturbation and after the initialization by observation assim-ilation, F: Forecast after Radar data assimilation) Fig. 9 Observation assimilation effect in the forecast system : WRF (control without the radar assimilation), ENKF(with the radar assimilation based on the new method), RADAR (base radar reflectivity observation); 16:30UTC (assimilation), 17:30UTC (spin-up), 19:00UTC & 21:00UTC (forecasts) Fig. 8 a) the updated model stated by the inversed innovation b) the mean reflectivity intensity improvements according to various weighting factors, c) Storm Coverage distribution improvement with the threshold value 10 dBZ The perturbation in this study changes linearly with height, thus modifying the stability of the model domain. Positively perturbed members are promoted toward greater potential instability increasing the surface temperature. In contrast, negatively perturbed members have decreased potential instability. (1) Assimilation cycles : how the error renormalization boosts the model sensitivity by given same magnitude of input innovation derives different heating intensities. (2) Spin-up cycles : the spin-up time can be also the practically important duration to monitoring the potentiality of storm development. (3) Forecast cycles: the intensity and the coverage of the thunderstorm in the model forecasting is most close to the radar measurement when f is equal to 0.1 which heightened the temperature sensitivity most actively in the assimilation cycles. Fig.5 New method in general from : Modulation of Probability Density Function (PDF) between different physical variables by normalization process with rescaling factors Fig.3 Sampling 15 ensemble members of the model variables by the initial perturbation of potential temperature field. 4. Weighting Technique 5. EnKF Reformulation 7. Summary • Assimilation of highly non-linear observations into a numerical weather prediction model -Proper perturbation method to generate physically meaningful ensemble members • -Maintenance of Gaussiandistributionin HA -Proper forecast correlation in BGE covariance matrix -Renormalization BG and OB by the Weighting technique • Good initial results for Madison flood case Table.3 The summary of the problems, solutions and results • Problem • Model limitation to produce enough BG error (ensemble spread). • 2. Observation assimilation • on the different error • evolution stages • (BG – initial state, • OB – maturing state) 1) HA approximation EnKF 2) Reformulation of BGE influence 3) Weighting Technique New Method Applying the Sherman–Morrison–Woodbury formula (Mendel 2006) Solution Introduce weighting factor “f” to modulate BG and OB errors (renormalization) to avoid ignoring observation information during assimilation cycles. Reference Evensen, G. (2003). "The ensemble Kalman filter: Theoretical formulation and practical implementation." Ocean Dyn. 53: 343–367. Xue, M., Y. S. Jung, et al. (2007). "Error modeling of simulated reflectivity observations for ensemble Kalman filter assimilation of convective storms." Geophysical Research Letters 34(10): 5 Snyder, C. and F. Q. Zhang (2003). "Assimilation of simulated Doppler radar observations with an ensemble Kalman filter." Monthly Weather Review 131(8) Whitaker, J. S. and T. M. Hamill (2002). "Ensemble data assimilation without perturbed observations." Monthly Weather Review 130(7): 1913-1924.: 1663-1677. Rescaled EnKF Optimization Fig.6 Background error underestimation problem and Weighting technique