Download
1 / 59
620 likes | 702 Views
Enhance understanding of processes, train plant staff, develop control strategies, and optimize operating conditions using theoretical models, deviation variables, and transfer functions.

E N D
Chapter 3 : Simple Process Dynamics and Transfer Function Professor Shi-Shang Jang Department of Chemical Engineering National Tsing-Hua University Hsinchu, Taiwan March, 2013
Improve understanding of the process Train plant operating personnel Develop a control strategy for a new process Optimize process operating conditions Motive of Developing First Principle Models
Theoretical (First Principle) models are developed using the principles of chemistry , physics, and biology. Theoretical models offer process insight into process behavior, and they are applicable over wide ranges of conditions They trend to be expensive and time-consuming to develop 3-1 Introduction
Stack gases FT 24 Air Air FY 23 TT 23 QY 23 TC 23 Set point Fuel Example - Industrial Furnace CV: temperature of the furnace MV: fuel flow rate to the furnace Figure 1-1
Temperature Time (min) Temperature Profile of TT23
DV Plant CV MV Plant Dynamics Flow rate Flow rate time time temperature temperature time time
DV Plant CV MV The Concept of Deviation Variables Flow rate Flow rate time time temperature temperature yd=y - ys time time
The Essence of Process Dynamics - Continued • The feedback process control needs to understand the relationships between CV and MV, on the other hand, feedforward process control needs to understand the relationships between DV and CV. The relationships are called process models. • For the ease of mathematical analyses, the process modeling only implements a linear model and Laplace transform instead of direct use of time domain process model. Implementation of deviation variables is needed as indicated below.
Empirical models are obtained by fitting experimental data. Empirical models typically do not extrapolate well, and their range is typically small. Empirical models are frequently used in the industrial environment since a theoretical model is basically not precisely available. 3-1 Introduction- Continued
Semi-empirical models are a combination of the models of theoretical and empirical models; the numerical values of the parameters in a theoretical model are calculated from experimental data. Semi-empirical models can (i) incorporate theoretical knowledge, (ii) extrapolate wider range than empirical range, (iii) require less effort than theoretical models. 3-1 Introduction- Continued
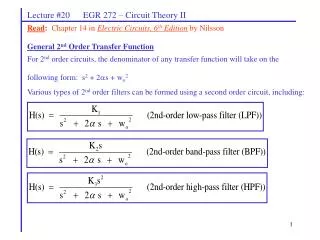
Constitution Equations Heat Transfer: Reaction Rate: Flow Rate: Equation of State: Phase Equilibrium: 3-2 General Modeling Principles:
- on the top of a variable= steady state of a variable, example: Capital = deviation variable, example: Capital with (s)= Laplace transform of a variable to the deviation variable, example: 3-3 Transfer Functions - Conventions
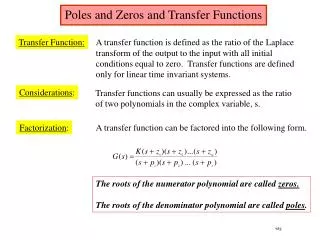
3-3. Transfer Function • Transfer function is a mathematical representation of the relation between the input and output of a system. • It is the Laplace transform of the output variable, y(t), divided by Laplace Transform of the input variable, x(t), with all initial conditions equal to zero. • The term is often used exclusively to refer to linear, time-invariant systems (LTI), and non-linear, real-system are linearize to obtain their Transfer Function. • So, Transfer Function G(s) for a system with input x(t) and output y(t) would be-
G(s) Y(s) X(s) More over Transfer Function • As for previous equation, it could be said that if transfer function for the system and input to the system is known, we can obtain the output characteristics of the system. • Transfer Function for the system could be easily obtained by dynamic study of the system and making balances for quantities like energy, mass etc. • We take inverse Laplace Transform to obtain time-varying output characteristics of Y(s). In block diagram:
3-3 Transfer Functions – Example: Thermal Process Ts Inputs: f(t), Ti(t),Ts(t) Output: T(t)
3-3 Transfer Functions – Cont. Let f be a constant V= constant, Cv=Cp
3-3 Transfer Functions – Cont. Let f be a constant V= constant, Cpi=Cp =time constant
Gp(s) (s) i(s) 3-3 Transfer Functions – Cont. where, Gp(s) is call the transfer function of the process, in block diagram:
Example: Mercury thermometer A mercury thermometer is registering a temperature of 75F. Suddenly it is placed in a 400F oil bath. The following data are obtained. • Estimate the time constant of the temperature using • Initial slope method • 63% response method • From a plot of log(400-T) versus time
Solution ((1) =9sec)
Comparisons Fit 1 Fit 2 Fit 3
By including the effect of surrounding temperature: 3-3 Transfer Functions – Cont.
Gp1(s) i(s) + Gp2(s) (s) Σ s(s) + 3-3 Transfer Functions – Cont.
Deviation Variables Examples (1) Thermal Process- Continued
Block Diagram Y1(s) K1 K2 M(s) D(s) 1s+1 2s+1 Y(s) + Y2(s)
h1 V1 f1 Cross-sectional=A1 h2 V2 f2 Cross-sectional=A2 3-3 Transfer Functions-An Example f0
H1(s) H2(s) F0(s) H2(s) F0(s) 3-3 Example Non-Interactive Tanks – Cont.
3-4 Transfer Functions and Block Diagrams – Cont. (Example 3-5.2)
3-4 Transfer Functions and Block Diagrams – Cont. (Example 3-5.3)
3-4 Transfer Functions and Block Diagrams – Cont. (Example 3-5.3)
K1 K2 K3 s+1 s+1 s+1 3-5 Gas Process Example – Cont. Mi(s) + - Σ Mo(s) P(s) - P1(s)
Time delay: 3-4 Dead Time – Cont.
Transportation lag (long pipelines) Sampling downstream of the process Slow measuring device: GC Large number of first-order time constants in series (e.g. distillation column) Sampling delays introduced by computer control 3-4 Causes of Dead Time - Cont.
Process with large dead time (relative to the time constant of the process) are difficult to control by pure feedback alone: Effect of disturbances is not seen by controller for a while Effect of control action is not seen at the output for a while. This causes controller to take additional compensation unnecessary This results in a loop that has inherently built in limitations to control 3-4 Effects of Dead-Time - Cont.
Consider a general transfer function for an input X(s) and an output Y(s): Note that the above case is always true , although many mathematical manipulating is needed as shown below: 3-5 Transfer Functions and Block Diagrams