Download
1 / 10
100 likes | 128 Views
Learn the crucial steps for drawing a free-body diagram in 2D and 3D force systems, including identifying forces, applying equilibrium equations, and handling statically indeterminate objects. Understand support reactions and maintain object rigidity.

E N D
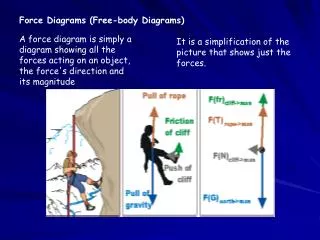
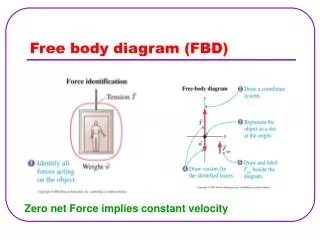
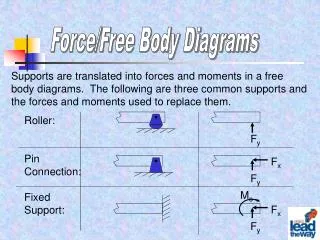
Procedure for drawing a free-body diagram - 2-D force systems • Imagine the body to be isolated or cut “free” from its constraints and connections, draw its outlined shape • Identify all the external forces and couple moments that act on the body • Applied loads • Reactions occurring at the supports or at points of contact with other bodies • Most common: roller, pin, fixed • Review additional supports, Table 5-1, pg 210 • Weight of the body • Applied at the center of gravity, G • When a body is uniform or made of homogeneous material, G will be located at the body’s geometric center or centroid (if not, it will be specified)
Procedure for drawing a free-body diagram - 2-D force systems (continued) • Indicate the dimensions of the body necessary for computing the moments of the forces • Forces and couple moments that are known should be labeled with their proper magnitudes and directions • Use letters to represent magnitudes and direction angles of forces and couple moments that are unknown • Need to assume a sense for the unknown forces and couple moments • Correctness of assumed sense will become apparent after solving equations of equilibrium for the unknown magnitudes (negative values – vector’s sense is opposite to that assumed in the free-body diagram)
2-D equilibrium • Equilibrium requires both a balance of forces, to prevent the body from translating with accelerated motion, and a balance of moments, to prevent the body from rotating • Equations of equilibrium • ∑ F = 0 • ∑ M(any point) = 0 • In the x-y plane • ∑ Fx = 0, algebraic sum of the x components • ∑ Fy = 0, algebraic sum of the y components • ∑ M(any point) = 0, algebraic sum of the couple moments and the moments of the force components about an axis perpendicular to the x-y plane and passing through any arbitrary point, which may lie either on or off the body
2-D equilibrium – procedure for analysis • Draw the free-body diagram • Apply equations of equilibrium • Establish the x,y,z axes • Apply equations of equilibrium: ∑ Fx = 0, ∑ Fy = 0, ∑ Mo = 0 • To avoid having to solve simultaneous equations apply the moment equation, ∑ MO = 0, about a point “O” that lies at the intersection of the lines of action of two unknown forces – the moments of these unknowns are zero about “O” and then able to obtain a direct solution for the third unknown SHOW
Two- and three-force members • Two-force members • Forces are applied at only two points and the member is not subjected to any couple moments • In order to maintain force (translational) equilibrium, ∑ F = 0, F’ must be of equal magnitude and opposite sense to F • In order to maintain moment (rotational) equilibrium, ∑ MP = 0, F’ must be collinear (i.e. have the same line of action) with F • SHOW • Examples include a cable or bar attached at two points • Three-force members • If a member is subjected to three forces, then it is necessary that the forces be coplaner and either concurrent or parallel if the member is to be in equilibrium • SHOW • EXAMPLES (pgs 234 - 243)
Free-body diagram - 3-D force systems • Support reactions, Table 5-2, pg 246 • Hinge and bearing supports • Single hinge and single bearing supports produce both force and couple moment reactions • When hinges and bearings are used in conjunction with other hinges and bearings, respectively, force reactions at these supports may alone be adequate for supporting the object (i.e. neglect couple moments on the free-body diagram) • The supports must be properly aligned when connected to the object • The object has to maintain its rigidity when loaded
3-D equilibrium • Vector equations • ∑ F = 0 • ∑ M(any point) = 0 • Scalar equations: • ∑ F = ∑ Fxi + ∑ Fyj + ∑ FZk = 0 • ∑ M(any point) = ∑ Mxi + ∑ Myj + ∑ MZk = 0 • Since i, j, k components are independent from one another • ∑ Fx = 0, ∑ Fy = 0, ∑ FZ = 0 • ∑ Mx = 0, ∑ My = 0, ∑ MZ = 0 (forces that are parallel to an axis or pass through it create no moment about the axis) • The set of axes for the force summation and moment summation do not have to coincide
Statically indeterminate objects • Some bodies may have more supports than are necessary for equilibrium - redundant supports • Some bodies may not have enough supports or the supports may be arranged in a particular manner that could cause the body to collapse - improper constraints
Redundant supports • Object has more supports than is needed to maintain it in equilibrium SHOW • Difference between the number of reactions and the number of independent equilibrium equations is called the degree of redundancy
Improper constraints • Object with improper constraining by the supports will not remain in equilibrium under the action of the loads exerted on it • The supports can exert only reactions that intersect at a common axis and this axis is perpendicular to the plane of the loads SHOW • The supports can exert only concurrent reactions SHOW • The supports can exert only parallel reactions SHOW • EXAMPLES (pg 262 - 267)