Download

1 / 16
160 likes | 300 Views
Team PYRO. Zixu Zhu Robert Cosman Jiyong Son Antony Williams Brandon Taylor Robert Hoggard. 12 March 2008. Introduction. Progress and Functional Specifications Unique Design Decisions Schedule and Milestones Through April 10. Structure. Overview of Progress. Modified Box Design

E N D
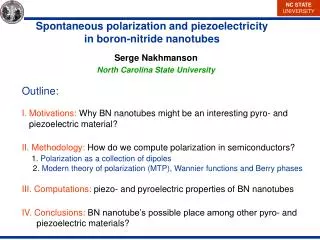
Team PYRO Zixu Zhu Robert Cosman Jiyong Son Antony Williams Brandon Taylor Robert Hoggard 12 March 2008
Introduction • Progress and Functional Specifications • Unique Design Decisions • Schedule and Milestones Through April 10
Structure Overview of Progress • Modified Box Design • 3 Stack System • Air cooling friendly material. • Lighter weight design was considered. • Simple Wiring Design • Each Stack has a hole for Wiring • Easy assemble and disassemble (easy to maintain) • Solid Safety guard. (easy to maintain)
Functional Specifications & Potential Design Able to left off – Total weight is under limit of thrust. Solid assemble on parts – Tree stack system Protection from the possible crash – Safety Guard Changed Safety Guard Design (Round -> Square) Protection from the possible flip down crash – Top led design in progress Structure
Design Decisions • Three stack system • Power Wiring • Position of complements on each stack • Safety Guard – parts / design Structure
Control Functional Specifications & Design Decisions Overview of Progress • Stable autonomous hovering using ultrasonic sensor for altitude control • Use PID control • Use ultrasonic for altitude control, camera for tracking • Implement integrator in PID loop • Serial communication with gumstix • Implement feed forward control
State Estimation Overview of Progress • Applied a Kalman Filter for state estimation in MatLab • Converted Kalman Filter from MatLab to C code • Predict 20 times between each sensor reading • Buffer of 10 sensor readings to get camera data • Declaring matrices as single dimensional arrays could improve memory usage
Design Decisions & Functional Specifications 2 Dimensional Arrays vs. Structs (Using Pointers) Use of Global Variables for Control Law Using a Separate Class to Perform Matrix Operations State Estimation
Vision Overview of Progress • All Assignments • Recognize 5 colors at same time • Output their locations. • Calculate Rotation Matrix • Calculate Roll, Pitch and yaw angle • Run simple program on GumStix • Installed OpenCV and IPP library • Take Image on GumStix and output Rotation Matrix and Angle from that Image. • Simple program to open the port on GumStix
Functional Specifications & Design Decisions Vision • Ubuntu Linux for GumStix • STUART port for communication between GumStix and AutoPilot • Recognize 5 colors • Output locations and rotation Matrix • Roll, Pitch and Yaw Angle • Potential design: • Send angles to State Estimate Program to filter the noise • Better target. • Find a way to lower the exposure rate in GumStix
Schedule and Milestones Structure • March 18 – Install All new connectors. • March 18~22 – finalize Safety Guard and Frame “Box” (Top cover)
Schedule and Milestones Control • 3/14/08 Serial communication with gumstix • 3/17/08 Implement integrator • 3/19/08 Have quadrotor track target using vision
Schedule and Milestones State Estimation • 3/19/08 Kalman filter in C code updated to reflect recent changes • 3/21/08 Have communication between Gumstix and Autopilot functional with Kalman filter • 3/28/08 Complete fine tuning – adjust tuning based on results of competition
Schedule and Milestones • 3/20/08 Compile vision code in gumstix • 3/23/08 Send date package to State Estimation program • 3/28/08 combine all we have and test in real world • 3/28/08 help Brandon and Robi with communication between AutoPilot and Gumstix Vision
Summary • A lot of good progress has been made and we are on track to have a fully autonomous quadrotor using ultrasonic and vision based guidance by the next competition

![[Team name] Team Award](https://cdn4.slideserve.com/678300/slide1-dt.jpg)