Download
1 / 60
600 likes | 624 Views
Explore the world of 2D Convex Hulls - from extreme points to algorithms and computational complexities, including gift-wrapping, Graham scan, and divide-and-conquer methods. Learn about Convex Hull Problem and its significance in computational geometry. Discover the intricacies of convex bodies, extreme points, and efficient algorithms for convex hull computation.

E N D
Computational Geometry2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Chapter 2: Devadoss-O’Rourke
p q p convex non-convex q Convexity Extreme points in red r p q Set X is convexif p,qX pq X Point p X is an extreme point if there exists a line (hyperplane) through p such that all other points of X lie strictly to one side
Convex Hull: Equivalent Def Convex combination of points:
Equivalent Definitions of Convex Hull, CH(X) Devadoss-O’Rourke Def {all convex combinations of d+1 points of X } [Caratheodory’sThm] (in any dimension d) Set-theoretic “smallest” convex set containing X. In 2D: min-area (or min-perimeter) enclosing convex body containing X In 2D:
Convex Hull in 2D Fact: If X=S is a finite set of points in 2D, then CH(X) is a convex polygon whose vertices (extreme points) are points of S.
Fundamental Algorithmic Problem: 2D Convex Hulls p2 More generally: CH(polygons) p7 p4 p8 p3 p1 p6 p5 p9 Output: (9,6,4,2,7,8,5) Input: n points S = (p1, p2, …, pn) Output: A boundary representation, e.g., ordered list of vertices (extreme points), of the convex hull, CH(S), of S (convex polygon)
Computational Complexity Function T(n) is O(f(n)) if there exists a constant C such that , for sufficiently large n, T(n) < C f(n)
Comparing O(n), O(n log n), O(n2) Function T(n) is O(f(n)) if there exists a constant C such that , for sufficiently large n, T(n) < C f(n) n n log n n² 210 10³ 10 • 210 104 220 106 220 106 20 • 220 2 • 107 240 1012 Interactive Processingn log n algorithms n² algorithms n = 1000 yes ? n = 1000000 ? no
2D Convex Hull Algorithms [DO] Section 2.2 • O(n4) simple, brute force (but finite!) • O(n3) still simple, brute force • O(n2) incremental algorithm • O(nh) simple, “output-sensitive” • h = output size (# vertices) • O(n log n) worst-case optimal (as fcn of n) • O(n log h) “ultimate” time bound (as fcn of n,h) • Randomized, expected O(n log n)
Lower Bound [DO] Section 2.5 y= x2 (xi,xi2 ) From SORTING: xi Note: Even if the output of CH is not required to be an ordered list of vertices (e.g., just the # of vertices), (n log n) holds Lower bound: (n log n) As function of n and h: (n log h) holds
Lower Bound [DO] Section 2.5 computing the ordered convex hull of n points in the plane.
Lower Bound [DO] Section 2.5 computing the ordered convex hull of n points in the plane. An even stronger statement is true:
Primitive Computation c b Left( a, b, c ) = TRUE ab ac > 0 c is left of ab a • “Left” tests: sign of a cross product (determinant), which determines the orientation of 3 points • Time O(1) (“constant”)
SuperStupidCH: O(n4) q s p O(n3) r O(n) • Fact: If s∆pqr, then s is not a vertex of CH(S) • p • q p • r p,q • s p,q,r: If s ∆pqr then mark s as NON-vertex • Output: Vertices of CH(S) • Can sort (O(n log n) ) to get ordered
StupidCH: O(n3) q p O(n2) r O(n) Applet by Snoeyink • Fact: If all points of S lie strictly to one side of the line pq or lie in between p and q, then pq is an edge of CH(S). • p • q p • r p,q: If r redthen mark pq as NON-edge (ccw) • Output: Edges of CH(S) • Can sort (O(n log n) ) to get ordered Caution!! Numerical errors require care to avoid crash/infinite loop!
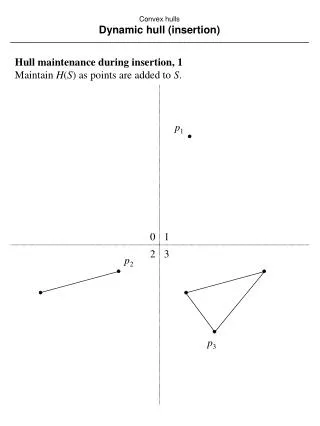
Incremental Algorithm [DO] Section 2.2
Incremental Algorithm Sort points by x-coordinate O(n log n) Build CH(X), adding pts left to right
O(nh) : Gift-Wrapping Jarvis March O(n) per step h steps Total: O(nh) r q p Key observation: Output-sensitive! Idea: Use one edge to help find the next edge. Output: Vertices of CH(S) Demo applet of Jarvis march
Gift-Wrapping [DO] Section 2.4
Gift-Wrapping [DO] Section 2.4
O(n log n) : Graham Scan O(n) O(n log n) O(n) CH so far • Idea: Sorting helps! • Start with vlowest(min-y), a known vertex • Sort S by angle about vlowest • Graham scan: • Maintain a stack representing (left-turning) CH so far • If pi is left of last edge of stack, then PUSH • Else, POP stack until it is left, charging work to popped points vlowest Demo applet
Graham Scan Red points form right turn, so are discarded [DO] Section 2.4
Graham Scan [DO] Section 2.4
Sorted points: Graham Scan [O’Rourke, Chapter 3]
[O’Rourke, Chapter 3] Stack History
O(n log n) : Divide and Conquer Time O(n) Time 2T(n/2) Time O(n) Sleft Sright Time: T(n) 2T(n/2) + O(n) T(n) = O(n log n) Split S into Sleftand Sright , sizes n/2 Recursively compute CH(Sleft), CH(Sright) Merge the two hulls by finding upper/lower bridges in O(n), by “wobbly stick” Demo applet
Divide and Conquer [DO] Section 2.6
Divide and Conquer [DO] Section 2.6
Divide and Conquer [DO] Section 2.6
QuickHull c = point furthest from ab c Discard points in abc B A Worst-case: O(n2 ) Avg: O(n) b a Works well in higher dimensions too! S • QuickHull(a,b,S) to compute upperhull(S) • If S=, return () • Else return (QuickHull(a,c,A), c, QuickHull(c,b,B)) Qhull website Qhull, Brad Barber (used within MATLAB)
QuickHull • Applet (programmed by Jeff So) • Applet (by Lambert) • When is it “bad”? (see hw2) • If no points are discarded (in abc), at each iteration, and • The “balance” may be very lop-sided (between sets A and B; in fact, one set could be empty, at every iteration!)
QuickHull [David Mount lecture notes, Lecture 3]
O(n log n) : Incremental Construction AMS 545 / CSE 555 Point location test: O(log n) Binary search: O(log n) • Add points in the order given: v1 ,v2 ,…,vn • Maintain current Qi= CH(v1 ,v2 ,…,vi) • Add vi+1: • If vi+1 Qi , do nothing • Else insert vi+1 by finding tangencies, updating the hull • Worst-case cost of insertion: O(log n) • But, uses complex data structures
O(n log n) : Randomized Incremental AMS 545 / CSE 555 • Add points in random order • Keep current Qi= CH(v1 ,v2 ,…,vi) • Add vi+1: • If vi+1 Qi , do nothing • Else insert vi+1 by finding tangencies, updating the hull • Expected cost of insertion: O(log n)
Add vi+1 Qi: • Start from “conflict” edge e, and walk cw/ccw to establish new tangencies from vi+1 , charging walk to deleted vertices • Rebucket points in affected cones • (update lists for each bucket) • Total work: O(n) + rebucketing work • E(rebucket cost for vjat step i) = • O(1) P(rebucket) O(1) (2/i) = O(1/i) • E(total rebucket cost for vj) = O(1/i) = O(log n) • Total expected work = O(n log n) vj AMS 545 / CSE 555 e vi+1 Backwards Analysis: vj was just rebucketed iff the last point inserted was one of the 2 endpoints of the (current) conflict edge, e, for vj Each uninsertedvj Qi(j>i+1) points to the bucket (cone) containing it; each cone points to the list of uninsertedvj Qiwithin it(with its conflict edge)
Output-Sensitive: O(n log h) h = output size AMS 545 / CSE 555 So, O(n log h) is BEST POSSIBLE, as function of n and h !! • The “ultimate” convex hull (in 2D) • “Marriage before Conquest” : O(n log h) • Lower bound (n log h) [Kirkpatrick & Seidel’86] • Simpler [Chan’95] • 2 Ideas: • Break point set S into groups of appropriate size m (ideally, m = h) • Search for the “right” value of m ( =h, which we do not know in advance) by repeated squaring
Chan’s Algorithm = O(n log h) AMS 545 / CSE 555 = O( h (n/h) log h) = O(n log h) v O(n ( log (221) + log (222) + log (223) + … log (22 log (log (h))) = O(n (21 + 22 + 23 + … + 2log (log (h)) )) = O(n (2 log h)) = O(n log h) v • Break S into n/m groups, each of size m • Find CH of each group (using, e.g., Graham scan): • O(m log m) per group, so total O((n/m) m log m) = O(n log m) • Gift-wrap the n/m hulls to get overall CH: • At each gift-wrap step, when pivoting around vertex v • find the tangency point (binary search, O(log m)) to each group CH • pick the smallest angle among the n/m tangencies: • O( h (n/m) log m) • Hope: m=h • Try m = 4, 16, 256, 65536,…
CH of Simple Chains/Polygons 1 2 n Input: ordered list of points that form a simple chain/cycle Importance of simplicity (noncrossing, Jordan curve) as a means of “sorting” (vs. sorting in x, y) Melkman’s Algorithm: O(n) (vs. O(n log n) or O(n log h))
Melkman’s Algorithm vt-1 vt vt-1 vb vi vi vt vb vb+1 vb+1 Simplicity helps! Keep hull in DEQUE: <vb,vb+1 ,…,vt-1 ,vt=vb> While Left(vb ,vb+1 ,vi) and Left(vt-1 ,vt ,vi) i i+1 Remove vb+1 , vb+2 ,… and vt-1 , vt-2 ,… until convexity restored New vb =vt = vi Claim: Simplicity assures that the only way for the chain to exit the current hull is via pockets vb vb+1or vt-1vt . Time: O(n), since O(1) per insertion