Download
1 / 12
120 likes | 400 Views
Model Based Control of Refrigeration Containers. Kresten Kjær Sørensen Lodam electronics a/s and Aalborg University. Outline Developmental, commercial and scientific objectives System overview Project status Issues that should be addressed Research. Developmental Objectives

E N D
Model Based Control of Refrigeration Containers Kresten Kjær Sørensen Lodam electronics a/s and Aalborg University
Outline • Developmental, commercial and scientific objectives • System overview • Project status • Issues that should be addressed • Research
Developmental Objectives “A set of methods that enable optimal, adaptive, constrained control of a refrigeration container that is also applicable to other thermodynamical systems”
Commercial Objectives • Better competitiveness through: • Reduced energy consumption • Reduced mechanical wear and tear • Improved adaptiveness of the controller
Scientific Objectives • To use MPC for refrigeration by: • Finding a suitable method for modeling nonlinear dynamics of the refrigeration system that may be used by an MPC. • Finding a method to cope with changes in system dynamics in the event of failure.
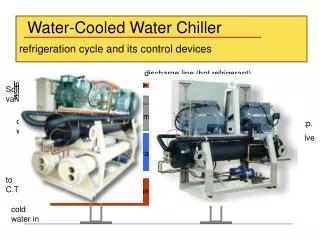
System overview • Known refrigeration system dynamics • Unknown cargo dynamics • Known constraints on cargo temperature • Economizer gives an additional degree of freedom
Project Status • A library of nonlinear refrigeration component models has been developed. • A composite simulation model has been developed. • A framework that allows to test a controller, working within Matlab, with real hardware is ready.
Simulation Model 1/2 • Nonlinear simulation model of the refrigeration system. • Composed of smaller component models from a library. • Simulation is done in Matlab by a set of custom functions.
Simulation Model 2/2 • The simulation model is described by a number of files • Each component are simulated separately for a short time step • All outputs at the end of the simulation is propagated to the relevant inputs • Simulation run again for another time step • Equivalent of simulating a large, combined function with ZOH’s inserted between components
Issues that must be addressed • The system is nonlinear and has a large area of operation for both hot and cold temperatures. • There are discrete actuators with strong influence on the dynamics that cannot be neglected. • In case of partial system malfunction it is very important to continue cooling.
Research • Adaptive MPC for increased robustness in the event of failure. • Auto-generation of a model usable with MPC, based on the simulation model.