Download
1 / 15
150 likes | 202 Views
Learn about geometric hashing in pattern matching for object recognition, including pose clustering and transformation comparisons. Explore advantages, structural comparison algorithms, and applications in protein interfaces and more.

E N D
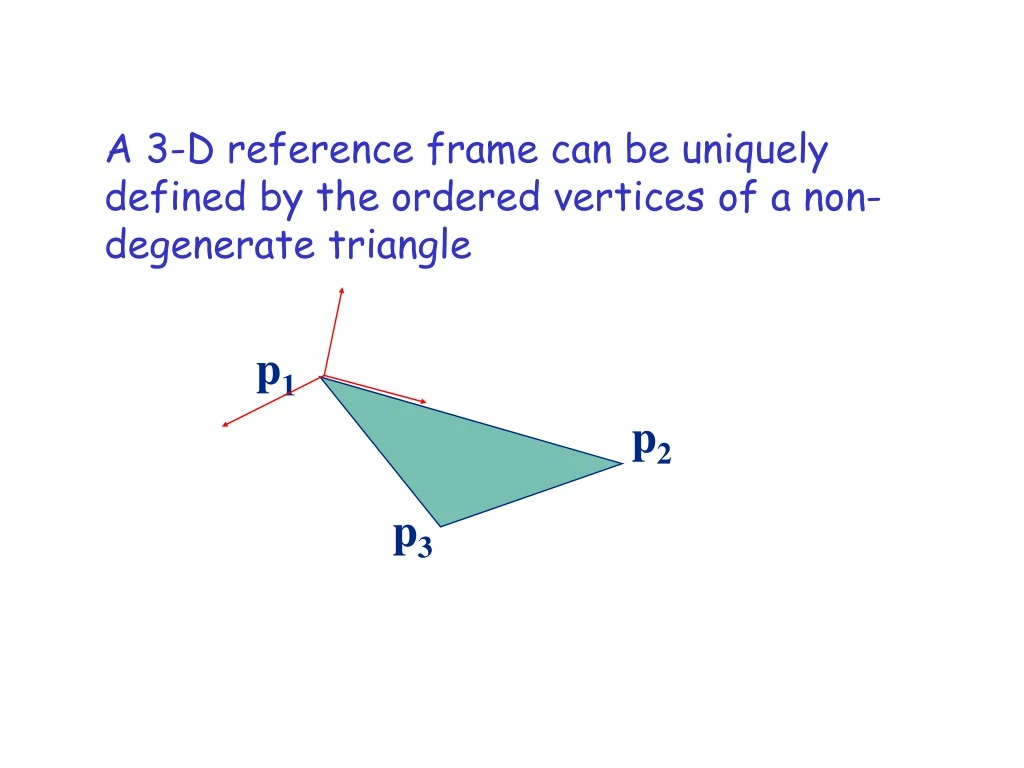
A 3-D reference frame can be uniquely defined by the ordered vertices of a non-degenerate triangle p1 p2 p3
Pattern Matching:Naive algorithm • For each pair of triplets, one from each molecule which define ‘almost’ congruent triangles compute the rigid motion that superimposes them. • Count the number of point pairs, which are ‘almost’ superimposed and sort the hypotheses by this number.
Naive algorithm (continued ) • For the highest ranking hypotheses improve the transformation by replacing it by the best RMSD transformation for all the matching pairs. • Complexity : assuming order of n points in both molecules - O(n7) . (O(n3) if one exploits protein backbone geometry.)
Object Recognition Techniques • Pose Clustering • Geometric Hashing (and more …)
Pose Clustering • Clustering of transformations. • Match each triplet from the first object with triplet from the second object. • A triplet defines 3D transformation. Store it using appropriate data structure. • High scoring alignments will result in dense clusters of transformations. Time Complexity: O(n3m3)+Clustering
Pose Clustering (2) • Problem: How to compare 2 transformations? Solutions: • Straightforward • Based on transformed points
Geometric Hashing • Inavriant geometric relations • Store in fast look-up table
Geometric Hashing - Preprocessing • Pick a reference frame satisfying pre-specified constraints. • Compute the coordinates of all the other points (in a pre-specified neighborhood) in this reference frame. • Use each coordinate as an address to the hash (look-up) table and record in that entry the (ref. frame, shape sign.,point). • Repeat above steps for each reference frame.
Geometric Hashing - Recognition 1 For the target protein do : • Pick a reference frame satisfying pre-specified constraints. • Compute the coordinates of all other points in the current reference frame . • Use each coordinate to access the hash-table to retrieve all the records (ref.fr., shape sign., pt.).
Geometric Hashing - Recognition 2 • For records with matching shape sign. “vote” for the (ref.fr.). • Compute the transformations of the “high scoring” hypotheses. • Repeat the above steps for each ref.fr. • Cluster similar transformation. • Extend best matches.
Complexity of Geometric Hashing O(n4 + n4 * BinSize) ~ O(n5 ) (Naive alg. O(n7))
Advantages : • Sequence order independent. • Can match partial disconnected substructures. • Pattern detection and recognition. • Highly efficient. • Can be applied to protein-protein interfaces, surface motif detection, docking. • Database Object Recognition – a trivial extension to the method • Parallel Implementation – straight forward
Structural Comparison Algorithms • Ca backbone matching. • Secondary structure configuration matching. • Molecular surface matching. • Multiple Structure Alignment. • Flexible (Hinge - based) structural alignment.
Protein Structural Comparison PDB files Feature Extraction Geometric Matching Verification and Scoring Rotation and Translation Possibilities Least Square Analysis Ca Other Inputs Geometric Hashing Backbone Secondary Structures Transformation Clustering Flexible Geometric Hashing H-bonds Sequence Dependent Weights