Download
1 / 1

E N D
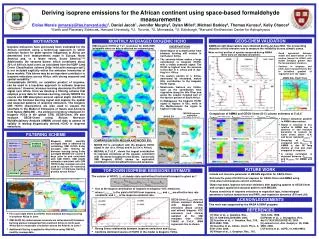
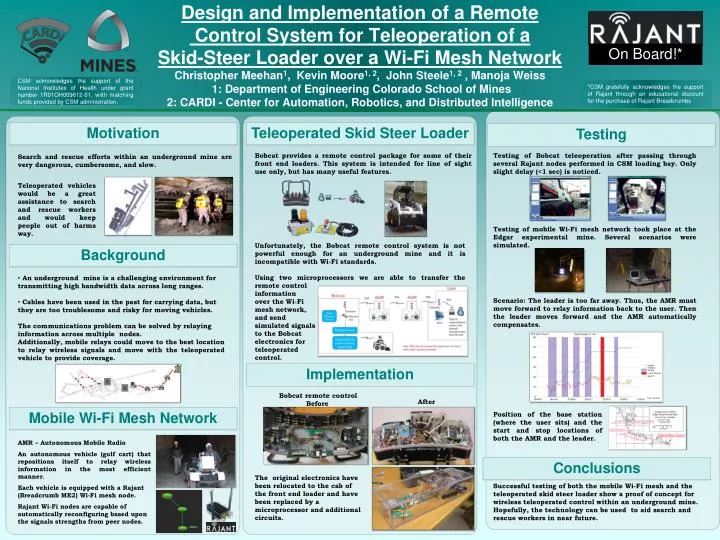
Design and Implementation of a Remote Control System for Teleoperation of a Skid-Steer Loader over a Wi-Fi Mesh NetworkChristopher Meehan1, Kevin Moore1, 2, John Steele1, 2 , Manoja Weiss 1: Department of Engineering Colorado School of Mines2: CARDI - Center for Automation, Robotics, and Distributed Intelligence On Board!* CSM acknowledges the support of the National Institutes of Health under grant number 1R01OH009612-01, wiith matching funds provided by CSM administration. *CSM gratefully acknowledges the support of Rajant through an educational discount for the purchase of Rajant Breadcrumbs Motivation Teleoperated Skid Steer Loader Testing • Bobcat provides a remote control package for some of their front end loaders. This system is intended for line of sight use only, but has many useful features. • Testing of Bobcat teleoperation after passing through several Rajant nodes performed in CSM loading bay. Only slight delay (<1 sec) is noticed. Search and rescue efforts within an underground mine are very dangerous, cumbersome, and slow. Teleoperated vehicles would be a great assistance to search and rescue workers and would keep people out of harms way. • Testing of mobile Wi-Fi mesh network took place at the Edgar experimental mine. Several scenarios were simulated. • Unfortunately, the Bobcat remote control system is not powerful enough for an underground mine and it is incompatible with Wi-Fi standards. • Using two microprocessors we are able to transfer the remote control • information • over the Wi-Fi • mesh network, • and send • simulated signals • to the Bobcat • electronics for • teleoperated • control. Background • An underground mine is a challenging environment for transmitting high bandwidth data across long ranges. • Cables have been used in the past for carrying data, but they are too troublesome and risky for moving vehicles. • The communications problem can be solved by relaying information across multiple nodes. • Additionally, mobile relays could move to the best location to relay wireless signals and move with the teleoperated vehicle to provide coverage. • Scenario: The leader is too far away. Thus, the AMR must move forward to relay information back to the user. Then the leader moves forward and the AMR automatically compensates. Implementation • Bobcat remote control • Before • After Mobile Wi-Fi Mesh Network • Position of the base station (where the user sits) and the start and stop locations of both the AMR and the leader. AMR – Autonomous Mobile Radio An autonomous vehicle (golf cart) that repositions itself to relay wireless information in the most efficient manner. Each vehicle is equipped with a Rajant (Breadcrumb ME2) Wi-Fi mesh node. Rajant Wi-Fi nodes are capable of automatically reconfiguring based upon the signals strengths from peer nodes. Conclusions • The original electronics have been relocated to the cab of the front end loader and have been replaced by a microprocessor and additional circuits. • Successful testing of both the mobile Wi-Fi mesh and the teleoperated skid steer loader show a proof of concept for wireless teleoperated control within an underground mine. Hopefully, the technology can be used to aid search and rescue workers in near future.