Download
1 / 1
10 likes | 95 Views
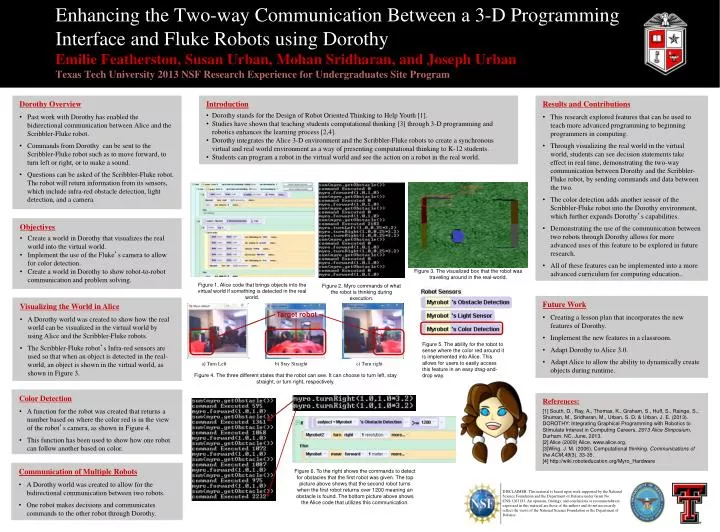
Enhancing the Two-way Communication Between a 3-D Programming Interface and Fluke Robots using Dorothy Emilie Featherston, Susan Urban, Mohan Sridharan , and Joseph Urban Texas Tech University 2013 NSF Research Experience for Undergraduates Site Progra m. Introduction

E N D
Enhancing the Two-way Communication Between a 3-D Programming Interface and Fluke Robots using DorothyEmilie Featherston, Susan Urban, Mohan Sridharan, and Joseph UrbanTexas Tech University 2013 NSF Research Experience for Undergraduates Site Program • Introduction • Dorothy stands for the Design of Robot Oriented Thinking to Help Youth [1]. • Studies have shown that teaching students computational thinking [3] through 3-D programming and robotics enhances the learning process [2,4]. • Dorothy integrates the Alice 3-D environment and the Scribbler-Fluke robots to create a synchronous virtual and real world environment as a way of presenting computational thinking to K-12 students. • Students can program a robot in the virtual world and see the action on a robot in the real world. • Results and Contributions • This research explored features that can be used to teach more advanced programming to beginning programmers in computing. • Through visualizing the real world in the virtual world, students can see decision statements take effect in real time, demonstrating the two-way communication between Dorothy and the Scribbler-Fluke robot, by sending commands and data between the two. • The color detection adds another sensor of the Scribbler-Fluke robot into the Dorothy environment, which further expands Dorothy’s capabilities. • Demonstrating the use of the communication between two robots through Dorothy allows for more advanced uses of this feature to be explored in future research. • All of these features can be implemented into a more advanced curriculum for computing education.. • Dorothy Overview • Past work with Dorothy has enabled the bidirectional communication between Alice and the Scribbler-Fluke robot. • Commands from Dorothy can be sent to the Scribbler-Fluke robot such as to move forward, to turn left or right, or to make a sound. • Questions can be asked of the Scribbler-Fluke robot. The robot will return information from its sensors, which include infra-red obstacle detection, light detection, and a camera. • Objectives • Create a world in Dorothy that visualizes the real world into the virtual world. • Implement the use of the Fluke’s camera to allow for color detection. • Create a world in Dorothy to show robot-to-robot communication and problem solving. Figure 1. Alice code that brings objects into the virtual world if something is detected in the real world. Figure 2. Myro commands of what the robot is thinking during execution. An edge of the box. • Future Work • Creating a lesson plan that incorporates the new features of Dorothy. • Implement the new features in a classroom. • Adapt Dorothy to Alice 3.0. • Adapt Alice to allow the ability to dynamically create objects during runtime. • Visualizing the World in Alice • A Dorothy world was created to show how the real world can be visualized in the virtual world by using Alice and the Scribbler-Fluke robots. • The Scribbler-Fluke robot’s Infra-red sensors are used so that when an object is detected in the real-world, an object is shown in the virtual world, as shown in Figure 3. Target robot Figure 5. The ability for the robot to sense where the color red around it is implemented into Alice. This allows for users to easily access this feature in an easy drag-and-drop way. Figure 3. The visualized box that the robot was traveling around in the real-world. a) Turn Left b) Stay Straight c) Turn right Figure 4. The three different states that the robot can see. It can choose to turn left, stay straight, or turn right, respectively. • Color Detection • A function for the robot was created that returns a number based on where the color red is in the view of the robot’s camera, as shown in Figure 4. • This function has been used to show how one robot can follow another based on color. References: [1] South, D., Ray, A., Thomas, K., Graham, S., Huff, S., Rainge, S., Shuman, M., Sridharan, M., Urban, S. D. & Urban, J. E. (2013). DOROTHY: Integrating Graphical Programming with Robotics to Stimulate Interest in Computing Careers, 2013 Alice Simposium, Durham, NC, June, 2013. [2] Alice (2009) Alice, www.alice.org. [3]Wing, J. M. (2006). Computational thinking. Communications of the ACM,49(3), 33-35. [4] http://wiki.roboteducation.org/Myro_Hardware • Communication of Multiple Robots • A Dorothy world was created to allow for the bidirectional communication between two robots. • One robot makes decisions and communicates commands to the other robot through Dorothy. Figure 6. To the right shows the commands to detect for obstacles that the first robot was given. The top picture above shows that the second robot turns when the first robot returns over 1200 meaning an obstacle is found. The bottom picture above shows the Alice code that utilizes this communication. DISCLAIMER: This material is based upon work supported by the NationalScience Foundation and the Department of Defense under Grant No.CNS-1263183. An opinions, findings, and conclusions or recommendationexpressed in this material are those of the authors and do not necessarilyreflect the views of the National Science Foundation or the Department ofDefense.