Download

1 / 9
90 likes | 286 Views
12.14.04 Group Seven Zac Lovato David Thompson Doug Yarholar Shang-Chih, Tsai Daryn , Wu. Robot Project. Experimentation. We spent a lot of time in the lab experimenting with the light sensitivity to the sensors.

E N D
12.14.04 Group Seven Zac Lovato David Thompson Doug Yarholar Shang-Chih, Tsai Daryn , Wu Robot Project
Experimentation • We spent a lot of time in the lab experimenting with the light sensitivity to the sensors. • We started with a low sensitivity and work our way up to a good sensitivity. • We tinkered with the width between the light sensors and found that very close sensors were able to make tighter turns and wider spacing made for faster times in the straight-aways.
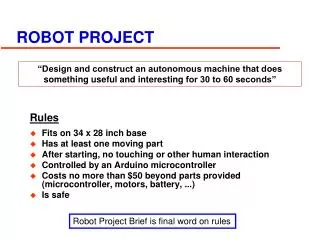
Design Changes • Our initial design for the car is very much the same as our test car. • We did changed from the front support design of “ The Nub ” to our final front support design of “ The Ski’s.”
Final Design • Large diameter wheels and tires • Front ski’s as supports • About two inches between the light sensors • Dual tire carrier on back for traction
Light Sensitivity • We made three different programs based on changing the light sensitivity of the light sensors. • For black, blue and green we used 45% sensitivity. • Red worked best with a 47% sensitivity • For yellow, we reversed the signs and set the sensitivity at 53%.
Design Problems • We had to little traction to the back wheels so we decided to add a dual spare-tire carrier to had weight to the rear wheels.
Conclusions • Our robot attained third place in the robot showdown. • Looking at the results we realized that it would have performed better in small angle turns if we had reversed one motor (depending on the side of the turn).
3rd Place