Download
1 / 36
360 likes | 533 Views
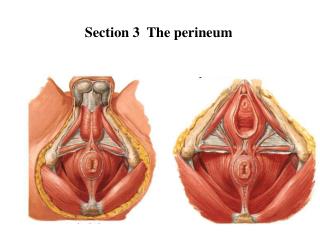
NUMERICKÁ ANALÝZA PROCESů. NAP1 3. Metoda konečných prvků, bázové funkce, integrace Generování sítě, časově proměnná geometrie Nes íťové metody (mesh free ). Rudolf Žitný, Ústav procesní a zpracovatelské techniky ČVUT FS 2010. MKP, Galerkin. NAP13.

E N D
NUMERICKÁ ANALÝZA PROCESů NAP13 Metoda konečných prvků, bázové funkce, integrace Generování sítě, časově proměnná geometrie Nesíťové metody (meshfree) Rudolf Žitný, Ústav procesní a zpracovatelské techniky ČVUT FS 2010
MKP, Galerkin NAP13 V kapitole NAP5 byla popsána metoda vážených reziduí MVR a trochu detailněji speciální případ, metoda konečných prvků MKP. Postupy byly demonstrovány na 1D problému stanovení rozložení tlaků při toku v potrubní síti (obyčejná diferenciální rovnice s druhými derivacemi typu d2p/dx2=f). Pro zopakování: 1) Diferenciální rovnici nahradíme požadavkem anulování váženého residua 2) Integrací per partes snížíme řád derivací v integrandu (výsledkem je slabá formulace) 3) Řešení p(x) nahradíme aproximací – lineární kombinací bázových (též tvarových) funkcí 4) Galerkinova metoda použije váhové funkce stejného typu jako bázové funkce Wj=Nj j=1,2,…,N 5) Řešení soustavy algebraických rovnic
MKP, Galerkin NAP13 Dvou a třídimenzionální problém se řeší stejně jako 1D, např.Poissonova rovnice 1) anulování váženého residua 2) Integrace per partes se ve 2D a 3D nazývá Greenova věta 3) Řešení p(x,y) nahradíme lineární kombinací bázových funkcí 4) Galerkin j=1,2,…,N Někdy se váhové funkce Wjkonstruují jinak než funkce bázové (třeba asymetrické váhové funkce orientované proti směru proudění). Pak se hovoří o metodě Galerkin-Petrov.
y i j x MKP, Galerkin NAP13 Předchozí postup (1 až 5) je zcela obecná Galerkinova metoda a nemusí to ještě být metoda konečných prvků. Ta je specifická konstrukcí bázových a váhových funkcí založených na pokrytí vyšetřované oblasti geometricky jednoduchými elementy, např. ve 2D trojúhelníky s uzly ve vrcholech: Každému uzlu je přiřazena právě jedna bázová funkce (např. uzlu i funkce Ni(x,y)), která je v tomto uzlu rovna jedné a ve všech ostatních uzlech nule (říká se, že taková funkce má vlastnost Kroneckerova delta): Uvnitř každého elementu je Ni definována jako interpolační polynom určený hodnotami v uzlech elementu. U trojúhelníku se třemi uzly to bude lineární polynom jehož 3 koeficienty jsou jednoznačně dány předepsanými hodnotami 1,0,0 ve vrcholech. Bázová funkce Ni je tedy různá od nuly jen v těch elementech, které obsahují uzel i.
MKP, Galerkin NAP13 Výsledná bázová funkce je spojitá (lineární průběh podél strany elementu je jednoznačně určený dvojicí uzlů sdílených sousedními elementy). Ale na rozhraní elementů (trojúhelníků) už nemá Ni spojité první derivace, které se při přechodu mezi elementy mění skokem. Tato nespojitost nevadí u problémů kde v integrandu počítaných koeficientů výsledné soustavy rovnic jsou jen první derivace. U problémů s diferenciálními rovnicemi se čtvrtými derivacemi (např. skořepiny) budou v integrandu i po provedení operací per partes stále ještě druhé derivace bázových funkcí a je nutné spojitost alespoň prvních derivací zajistit. V přednášce NAP5 musely být u 1D nosníků použity Hermiteovské kubické bázové funkce, ve 2D trojúhelníkových elementech to už musí být polynomy pátého stupně. Kromě způsobu definice funkcí Ni je pro konečné prvky charakteristický způsob výpočtu integrálů koeficientů soustavy, např. Koeficienty jsou počítány jako součet numericky vyčíslených integrálů přes jednotlivé elementy. Je tedy zřejmé, že správně definovaná síť elementů nesmí mít překrývající se elementy (jejich příspěvky by se počítaly dvakrát) ani v ní nesmí být žádné díry.
Generátory sítí NAP13 Pro libovolně vygenerovanou množinu uzlových bodů lze vytvořit odpovídající síť kontrolních objemů a konečných prvků např. metodou Voronoj polygonů (ve 2D i ve 3D) Metoda kontrolních objemů Metoda konečných prvků Voronoi polygon Delaunay triangulace Voronoi kontrolní objem uzlu i. Množina bodů x,y majících vzdálenost k i menší než vzdálenost ke kterémukoliv jinému j i j
Proměnná geometrie NAP13 Komplikace při aplikaci MKP i CVM způsobují inherentně nestacionární případy s časově proměnnou geometrií, které vyžadují dynamické generování sítě konečných elementů nebo objemů. Typické příklady: • Pístový motor (proměnná poloha pístu, eventuálně ventilů). Pro každou polohu pístu se buď modifikuje stará síť (metody typu Arbitrary Lagrangian-Eulerian ALEEncyclopedia of Comp.Mechanics 2004, které přizpůsobují síť pohybujícímu se rozhraní) nebo se generuje nová síť (ANSYSYouTube). Podobný případ je zaplňování formy nebo expanze škrobu. • Jednošroubové extrudery, kompresory a turbiny či míchací zařízení, charakterizované měnící se vzájemnou polohou stacionárních narážek míchadla či statoru a lopatek rotující turbiny. Pro řešení se výpočtová oblast rozdělí na rotující zónu (s rotujícím souřadným systémem kde se uplatní Coriolisovy a odstředivé síly ) a stacionární zónu. Na hranici zón jsou modelovány silové interakce, ve Fluentu např. metodami MRF (Multiple Reference Plane) se zjednodušujícím předpokladem stacionárního toku, nebo metodou klouzající sítě SM (Sliding Mesh) respektující nestacionární charakter toku a časově proměnná napětí i rychlosti na rozhraní. • Třetím případem jsou extrudery, přičemž zvláště komplikovaný případ představují dvoušroubové extrudery (komplikace působí nutnost modelovat tok ve velmi malých štěrbinách mezi šrouby a mezi pláštěm) J.-F. Hétu, F. Ilinca: Immersed boundary finite elements for 3D flow simulations in twin-screw extruders. Computer and Fluids, 2012
Proměnná geometrie MKP NAP13 Případy s volnou hladinou nebo s interakcí tekutina/pružná stěna (FSI), když geometrie pohybujícího se rozhraní není apriori známá, se zpravidla řeší metodami typu ALE (uzly/elementy alespoň částečně sledují pohyb materiálových bodů). Případy typu extruder, míchadlo, kdy je geometrie rozhraní kapalina/tuhá fáze známá, se mohou řešit fixní sítí, viz zmíněné metody MRF a SM používané v programu Fluent (tj. v metodě kontrolních objemů). Princip aplikací, které využívají metodu konečných prvků, spočívá v tom, že se celý objem míchadla nebo extruderu pokryje fixní sítí čtyř nebo šestistěnných elementů a teprve uvnitř této sítě se pohybuje síť ploch, které reprezentují např. rotující šroub extruderu. Existuje řada subvariant: IB-BCE Immerse Boundary, Body Conformal Enrichment (viz. např. Hétu J.F., Illinca F. Immersed Boundary Finite Elements for 3D flow simulations in twin-screw extruders. Computers & Fluids, 2012). Prakticky totéž jeMPT (Mesh Partitioning Technique), viz. Gupta M. MPT for 3F simulation of extrusion. ANTEC 2008.Základem je fixní konečněprvková síť, přes kterou přecházi pohyblivé rozhraní (popsané technikou Level-Set function) jehož průsečíkem se sítí elementů je vnořená hranice. Na rozhraní jsou v každém časovém kroku dočasně generovány nové elementy (každý element je celý buď kapalina nebo těleso). FDM Fictious Domain Methods (viz. např. Bertrand F. et al.: Adaptive Finite Element simulations of fluid flow in twin-screw extruders. Computers and Chemical Engineering, 27 (2003), pp. 491-500, nebo A. S. Fard et al. FDM and XFEM for Stokes flow inside complex geometries. Int. J. Numer. Meth. Fluids 2012; 68:1031–1052). Omezující podmínky na pohybujícím se rozhraní jsou modelovány pomocí Lagrangeových multiplikátorů. MSTMesh Superposition Technique (viz. např. Connelly R.K., Kokini J.L.: Examination of the mixing ability of single and twin screw mixers using 2D FEM simulation with particle tracking, J. Food Engineering 79 (2007), pp.956-969, nebo Emin M.A. Schuchmann H.P.:Analysis of the dispersive mixing efficienty in twin-screw extrusion. J.Food Engineering 115 (2013),pp.132-143). Metoda je v hrubých rysech popsána na následující folii.
Proměnná geometrie MST NAP13 V metodě superpozice sítí (Mesh Superposition Technique) se generují dvě konečněprvkové sítě: fixní a dynamická (rotující). V každém čase a pro každý bod (x,y,z) je tím určeno zda bod leží či neleží v pohyblivé síti (H=0 označuje bod v tekutině, H=1 bod, který je součástí rotujícího tělesa). V každém bodě (a v každém konečném elementu) se řeší rovnice transportu hybnosti a rovnice kontinuity kde druhý člen je pokutová funkce zajišťující stabilitu řešení a spojitost tlaků ( je penalizační parametr jehož zvýšení řešení vyhlazuje). ANSYS POLYFLOW používá defaultní hodnotu =0.01, kvadratické bázové funkce pro rychlosti a konstantní tlaky v jednotlivých elementech. Poznámka: MST je vlastně jen zjednodušená verze FDM, která místo pokutové funkce používá Lagrangeovy multiplikátory.
Proměnná geometrie MST NAP13 Connelly R.K., Kokini J.L.: Examination of the mixing ability of single and twin screw mixers using 2D FEM simulation with particle tracking, J. Food Engineering 79 (2007), pp.956-969 Řešení jedno a dvoušroubového extruderu konečněprvkovým programem ANSYS Polyflow (zobecněná Newtonská kapalina – model Carreau). Poznámka: stávající verze MST Polyflow ještě neumí modelovat viskoelasticitu. jednošroubový extruder se modeluje snadno (a mnohem přesněji) v rotujícím souřadném systému (šroub stojí, válec rotuje) dvoušroubový extruder se musí modelovat MST (i za cenu ztráty přesnosti na povrchu šroubu). Nebylo ani možné použít přesnější metodu klouzající sítě SM, protože rotory se překrývají
Meshlessnesíťové aproximace funkcí NAP13 Nutnost generování sítě je v řadě aplikací vážnou komplikací (rozvoj mikrotrhlin, nespojitosti, pohyblivé rozhraní, molekulární dynamika, biomechanika). To je motivem pro vývoj metod, které pro definici bázových Ni i váhových Wi funkcí (ekvivalentní název tvarové a testovací funkce) nepotřebují síť elementů a Ni, Wj definují jen na základě souřadnic uzlových bodů. Friedrich
Meshless nesíťové aproximace funkcí NAP13 Existují desítky metod, které lze do kategorie nesíťových zařadit, např. SPH (Smoothed Particle Hydrodynamics viz předchozí přednáška),Lattice Boltzman (podobně jako SPH vychází z modelu částic), RKPM(Reproducing Kernel Particle Method, Liu:large deformation Mooney), MLPG (Meshless Local Petrov Galerkin), RBF (Radial basis function, wave equation). Všechny tyto metody formálně aproximují hledané funkce integrály konvolučního typu Doporučená literatura: Shaofan Li, Wing Kam Liu: Meshfree Particle Method, Springer Berlin 2007 (v této monografii je rozebírána většina výše uvedených metod a jejich aplikací z mechaniky elastoplastických materiálů, rázových jevů, lomové mechaniky, proudění, biologických systémů, např. tok a deformace červených krvinek, dynamika srdečních chlopní). Přehledový článek integrálních aplikací Atluri S.N., Shen S.: The meshless local Petrov Galerkin (MLPG) method, CMES, vol.3, No.1, (2002), pp.11-51. Ukázka použití kolokační metody:Shu C., Ding H., Yeo K.S.: Local radial basis function-based differential quadrature method and its application to solve two dimensional incompressible Navier Stokes equations, Comp.Methods Appl.Mech.Engng, 192 (2003), pp.941-954 V této přednášce budeme analyzovat trochu blíže jen některé způsoby konstrukce nesíťových interpolačních funkcí (Shepardovy funkce, klouzavé čtverce MLS moving least squares, RBF radial base functions), které lze použít v integrálech u slabých formulací PDE, tj. u metod Galerkinovského typu, popsaných v předchozích odstavcích, ale i v kolokačních metodách, kde jako testovací funkce se použije Diracova delta funkce (tj. kdy se požaduje anulování reziduí řešených rovnic v uzlových bodech).
Shepardovy fkce NAP13 Nejjednodušší konceptaproximačních nesíťových funkcí představují Shepardovy funkce, kde Ni(x) jsou bázové a wi(x)jsou váhové funkce To, že je aproximace přesná pro konstantu, plyne z ale pro každé x musí být alespoň jedna funkce w různá od nuly Shepardovy funkce jsou úplné jen v prostoru konstantních funkcí, tzn. jsou schopny přesně popsat jen konstantní funkce (viz následující příklad). Nicméně jsou spojité a diferencovatelné. Váhové funkce wi(x) se vztahují ke každému uzlovému bodu a jsou to buď Gaussovské funkce (typu exp(-x2)) nebo splajny 4-tého stupně kde ri je poloměr kruhu nebo koule, v níž je váhová funkce definována (mimo tuto oblast je wi nulová). Pozn.: Koeficienty mocnin 1,-6,8,-3 zajišťují nulové derivace splajnu v počátku i na hranici d=1. Štíhlost bázových funkcí (ri) lze volit, čím širší je funkce w (čím větší r), tím je aproximace méně lokální a hladší, viz následující příklad.
Jako uzlové hodnoty byla zvolena přímka yn=1+xn; r=2i když jsou uzlové hodnoty lineární, aproximace je křivka (a není to interpolace) function nd=shape(x,xn,n,r) sum=0; for i=1:n d=abs(x-xn(i))/r; if d<1 w(i)=1-6*d^2+8*d^3-3*d^4; else w(i)=0; end sum=sum+w(i); end for i=1:n nd(i)=w(i)/sum; end r=0.5 v některých bodech není N definována Shepardovy fkce příklad NAP13 Příklad, který ukazuje, že Shepardova aproximace je hladká křivka, která ale neinterpoluje uzlové hodnoty a není schopna přesně popsat ani lineární průběh (přesně umí popsat jen konstantu)
(x) xl Klouzavé čtverce MLS NAP13 Nejčastěji se používají nesíťové aproximace v poněkud složitější variantě MLS (moving least squares) – klouzavé metodě nejmenších čtverců. Princip metody spočívá v nahrazení průběhu Φ(x) regresním polynomem (někdy jen konstantou, často lineárním, někdy kvadratickým polynomem), jehož koeficienty se stanoví regresí uzlových hodnot metodou nejmenších čtverců (N-uzlových hodnot) kde w(x) jsou váhové funkce, p(x) bázové polynomy, vektor dimenze M (např. p1(x)=1, p2(x)=x, a jsou koeficienty regresního polynomu (vektor dimenze M), a l uzlové hodnoty aproximované funkce
Klouzavé čtverce MLS NAP13 Specifikum MLS je v tom, že v každém bodě x oblasti (a nemusí to být právě uzlový bod) se konstruuje jiný regresní polynom s koeficienty a(x), které závisí na x. Výsledkem je následující vyjádření aproximační funkce kde matice AMxM a BMxN jsou definovány takto (M-počet bázových polynomů, N-počet dat)
Klouzavé čtverce MLS NAP13 Odvození MLS:Přepišme kriterium součtu čtverců z vektorové do složkové notace (x je libovolný, ale vzhledem k optimalizaci pevný bod) což je soustava algebraických rovnic pro koeficienty ai(x) j=1,2,…,M odkud již přímo vyplývají výše uvedené vztahy.
Klouzavé čtverce MLS NAP13 Tvarové funkce Nl(x) získané metodou MLS jsou funkce hladké a tudíž derivovatelné (někdy přílišná hladkost až vadí, třeba při řešení PDE se skokem se měnícími koeficienty). Hladkost ještě neznamená, že by MLS byla například schopná přesně nahradit polynomy libovolného stupně. Bázové funkce Nl(x) jsou schopny přesně popsat jen obecné polynomy stupně m (čím vyšší m tím vyšší řád přesnosti aproximace) a tento stupeň m je dán volbou použité báze p(x), např. M=1 p=[1] pouze polynom nultého stupně m=0 M=3 (2D) p=[1,x,y] polynom prvního stupně m=1 =4 (3D) p=[1,x,y,z] M=6 (2D) p=[1,x,y,x2,xy,y2] polynom druhého stupně m=2 =10(3D) p=[1,x,y,z,x2,y2,z2,xy,xz,yz] To, že MLS bázové funkce jsou schopny přesně popsat polynomy až do stupně m plyne automaticky z jejich definice (stačí uvažovat konstantní koeficienty ai) Pro diferenciální rovnice s druhými derivacemi (např. pro transportní rovnice) stačí m=1, tj. stačí, když numerická aproximace dokáže přesně popsat libovolné lineární řešení. Často funguje i varianta m=0 (tj. když bázové funkce dokáží přesně popsat alespoň konstantní řešení), což je speciální případ Shepardových funkcí.
Klouzavé čtverce MLS NAP13 V metodě MLS hrají klíčovou roli váhové funkce wi. Kdyby to nebyly funkce, ale konstanty (například wi=1)byla by matice A i vektor B konstantní, nezávislá na souřadnici x. Tato varianta byla odvozovaná již v přednášce o regresní analýze NAP2 (jen pozor na odlišnou symboliku). Výsledkem (pro konstantní váhy wi) je ovšem globální aproximace řešení např. jedinou lineární funkcí na celé oblasti řešení, což ovšem znamená „vymazání“ všech lokálních odchylek. Použití regresní analýzy v klouzavém okénku, kterážto technika byla vysvětlena rovněž v přednášce NAP2, sice umožní vystihnout lokální vlastnosti a k metodě MLS s váhovými funkcemi wi(x) má velmi blízko, jenomže aproximační funkce není dostatečně hladká. Tudíž: Technika nejmenších čtverců s klouzajícím okénkem je možná vynikající pro filtraci dat (metoda Savitzky Golay popisovaná v NAP2), ale je méně vhodná pro definici bázových funkcí použitelných v integrální formulaci problému.
Klouzavé čtverce MLS NAP13 Porovnání těchto tří typů aproximací (MLS, globální regrese, klouzavé okénko) ukážeme na 1D příkladu a lineární bázové polynomy Koeficienty aproximačního polynomu v libovolném bodě x jsou řešením soustavy rovnic Jako váhové funkce použijeme dříve uvedený splajn
Klouzavé čtverce MLS NAP13 hladká křivka je MLS (Moving Least Squares) pro r=0.2 r=0.2; x=linspace(0,1,1000); xv=[0.05 0.12 0.2 0.35 0.37 0.39 0.45 0.55 0.61 0.75 0.9 0.92]; fi=[1 2 2 2.5 5 7 6 2 2 8 9 10]; n=length(xv) hold off figure(1) plot(xv,fi,'b*') hold on for i=1:1000 X=x(i); a11=0;a12=0;a22=0;b1=0;b2=0; for l=1:n W=w(l,X,xv,r); a11=a11+W; a12=a12+W*xv(l); a22=a22+W*xv(l)^2; b1=b1+W*fi(l); b2=b2+W*xv(l)*fi(l); end A=[a11 a12;a12 a22]; B=[b1;b2]; a=inv(A)*B; f(i)=a(1)+a(2)*X; end plot(x,f) zelená čára je lineární regrese ze 3 sousedů r-poloměr váhových funkcí, xv,fi vektory souřadnic a hodnot (12 uzlových bodů) a vykreslení (hvězdičky) Výpočet aproximace metodou MLS. Váhová funkce w je definována jako M=file L=3; for i=1:1000 X=x(i); if X>xv(L-1) L=min(n,L+1); end A=[3 xv(L-2)+xv(L-1)+xv(L); xv(L-2)+xv(L-1)+xv(L) xv(L-2)^2+xv(L-1)^2+xv(L)^2]; B=[fi(L-2)+fi(L-1)+fi(L);fi(L-2)*xv(L-2)+fi(L-1)*xv(L-1)+fi(L)*xv(L)]; a=inv(A)*B; f(i)=a(1)+a(2)*X; end plot(x,f,'g') Lineární regrese ze tří sousedních uzlových bodů (klouzavé okénko)
Klouzavé čtverce MLS NAP13 Váhové funkce (definované jako splajny 4-stupně (M-funkce)) function weig=w(i,x,xv,r) d=abs(x-xv(i))/r; if d<1 weig=1-6*d^2+8*d^3-3*d^4; else weig=0; end for i=1:1000 X=x(i); a11=0;a12=0;a22=0; for l=1:n W=w(l,X,xv,r); a11=a11+W; a12=a12+W*xv(l); a22=a22+W*xv(l)^2; B(1,l)=W; B(2,l)=W*xv(l); end A=[a11 a12;a12 a22]; C=inv(A)*B; sumn(i)=0; for l=1:n N(i,l)=C(1,l)+X*C(2,l); sumn(i)=sumn(i)+N(i,l); end end figure(2) for l=1:3 plot(x,N(:,l)) hold on end plot(x,sumn,'g') Bázové (nazývané též tvarové) funkce počítané dle
Klouzavé čtverce MLS NAP13 Zde použité váhové funkce jsou splajny se stejně širokou základnou (r=0.2) w1 w2 w3 w12 N1 N3 N2 Grafické znázornění prvních tří tvarových funkcí. Zelená čára je součet všech tvarových funkcí (=1, tím je dokumentováno, že LMS přesně reprezentuje konstantu).
tento bod leží v dosahu uzlu 1,3,2 a to stačí tento bod leží jen v dosahu uzlu 5 a to nestačí Tvarová funkce Nl nemá vlastnost Kroneckerova delta, tj. v uzlu xl není rovna jedné a navíc jsou v tomto uzlu nenulové i další tvarové funkce. Na předchozí folii jsme jenom dokázali, že součet všech tvarových funkcí v libovolném bodě x a tedy i v každém uzlu je roven jedné (této vlastnosti se říká „partition of unity“). Důsledkem je to, že koeficienty lineární aproximace nemají přímo význam uzlové hodnoty jak je tomu např. v metodě konečných prvků, kde se tvarové funkce konstruují tak, aby vlastnost Kroneckerova delta byla automaticky splněna Klouzavé čtverce MLS NAP13 Shrňme předchozí výsledky MLS: To je nevýhoda MLS aproximace, protože nelze jednoduše zajistit splnění Dirichletových okrajových podmínek – viz následující folie
Klouzavé čtverce MLS NAP13 Kdyby tvarové funkce splňovaly podmínku Kroneckerova delta, stačilo by zajistit Dirichletovu okrajovou podmínku tak, že požadovaná hodnota na hranici by byla přímo uzlový parametr a v Galerkinově formulaci by mohla být hodnota odpovídající váhové funkce w nulová. Například při řešení dříve uvedené Poissonovy rovnice pro tlak p, který je předepsán na celé hranici oblasti , by slabá formulace vypadala takto Pokud tvarové funkce vlastnost Kroneckerova delta nemají, musí se použít metoda pokutové funkce nebo metoda Lagrangeova multiplikátoru (ta je dost podobná, místo voleného penalizačního parametru je optimalizovaný multiplikátor )
Klouzavé čtverce MLS NAP13 Galerkinova metoda řešení PDE vyžaduje umět počítat integrály derivací tvarových funkcí dle souřadnic x,y,z. Derivace libovolného řádu se počítají přímo z definice tvarových funkcí (uvědomte si, že na rozdíl od metody konečných prvků zde nejsou žádná rozhraní mezi elementy a tudíž mizí problémy nespojitostí). a parciální derivace invertované matice A se počítají na základě identity Výrazy pro derivace vyšších řádů lze nalézt např. v článku Atluri S.N., Shen S.: The meshless local Petrov Galerkin (MLPG) method, CMES, vol.3, No.1, (2002), pp.11-51
pro srovnání dříve používané váhové funkce Radiální bázové funkce RBF NAP13 Nepříjemnou vlastností předchozích tvarových funkcí (metoda MLS-moving least squares, jejímž speciálním případem jsou Shepardovy funkce, ale i další příbuzné interpolační funkce) je to, že nemají vlastnost Kroneckerova delta, což komplikuje numerickou realizaci Dirichletových okrajových podmínek. Existuje ale jedna výjimka, a tou je interpolace radiálními bázovými funkcemi RBF, např. Kompaktní nosič (kruh nebo koule) Ri-radiální bázová funkce i-tého uzlu s kompaktním nosičem xi x ri Wu Z.: Compactly supported positive definite radial functions. Adv.Comp.Math. 4, pp.389-396 (1995) Poznámka: Buďte opatrní při čtení odborné literatury kde je pod pojmem radiální bázová funkce RBF míněno často něco, co nemá kompaktní nosič a může to být funkce, která není omezená a utíká do nekonečna (viz další folie).
j i Radiální bázové funkce RBF NAP13 RBF interpolační funkce ovšem nemusí mít kompaktní nosič (tj. nemusí být koncentrované jen kolem „svého“ uzlu). Typickými příklady jsou RBF („multiquartic“ funkce) („thin plate spline“) Aproximace, která interpoluje N hodnot i v uzlových bodech i=1,…,N je lineární kombinací těchto RBF a N koeficientů 1,…, N je dáno řešením soustavy lineárních algebraických rovnic Tvarové funkce jsou tedy a vlastnost Kroneckerovo delta plyne z
Radiální bázové funkce RBF NAP13 Interpolační funkce je jednoznačná, pokud matice soustavy Rij není singulární, což se někdy může stát (např. když první uzlový bod je v centru a ostatní uzlové body leží na povrchu jednotkové koule , budou v prvním řádku i sloupci samé nuly, takže determinant matice soustavy bude nulový). Nepříjemnou vlastností RBF je ale především neschopnost popsat přesně konstantní funkce (i lineární kombinace , která nabývá v uzlech konstantní hodnoty, se mezi těmito uzly stále trochu vlní). Tuto nectnost lze odstranit přidáním konstanty N+1 neznámých koeficientů této modifikované interpolační funkce musí splňovat N interpolačních podmínek a také podmínku Pozn.: pro přesnou aproximaci konstanty (x)=1 musí být všech N koeficientů i rovno nule.
Radiální bázové funkce RBF NAP13 Předchozí koncept lze snadno zobecnit a doplnit lineární kombinaci RBF o lineární kombinaci polynomů kde např. pro M=3. Kromě N interpolačních podmínek je tedy třeba mít M dalších rovnic např. Důkaz toho, proč je třeba formulovat dodatečné podmínky výše uvedeným způsobem a že je tím zajištěn přesný popis všech polynomů až do stupně m, uvádí Charles A. Micchelli: Interpolation of Scattered Data: Distance Matricesand Conditionally Positive Definite Functions. Constr. Approx. (1986) 2:11-22. Pro mne je to příliš složité. Nabízím 100 Kč tomu, kdo mi to vysvětlí inženýrským způsobem (prostě tak, abych tomu rozuměl).
Aplikace NAP13 Friedrich
Aplikace NAP13 Friedrich
Aplikace NAP13 Local topology: each point is associated with nearest NF points …… This is Hardy multiquadrics radial base function Friedrich
Aplikace NAP13
Aplikace NAP13 Benchmark-pure convection
Aplikace NAP13 FLUENT 6.2