Download
1 / 7
70 likes | 228 Views
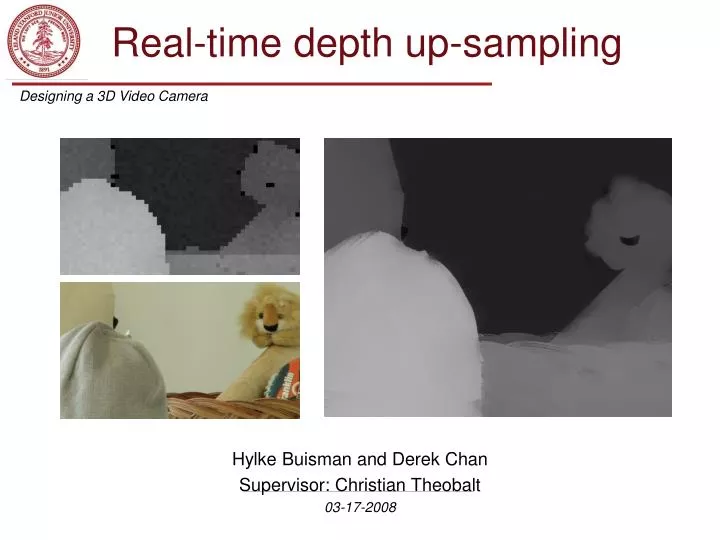
Real-time depth up-sampling. Hylke Buisman and Derek Chan Supervisor: Christian Theobalt 03-17-2008. Problem description. Primary goals Super resolution and noise removal Input: low-res depth map, high-res color image Output: 3D mesh of up-sampled and denoised depth

E N D
Real-time depth up-sampling Hylke Buisman and Derek Chan Supervisor: Christian Theobalt 03-17-2008 Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Problem description • Primary goals • Super resolution and noise removal • Input: low-res depth map, high-res color image • Output: 3D mesh of up-sampled and denoised depth • Optimize for (near) real-time processing • Data samples Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Approach Bilateral filter affects only areas of similar color Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Approach • Joint bilateral up-sampling (Kopf et al.): • Implementations explored: • Bilateral grid (Paris & Durand 2007) • Separable kernel approximation Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Results + = Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Results + = Input Result Runtimes (800 x 600 image) Hylke Buisman and Derek Chan Supervisor: Christian Theobalt
Hidden slide • Hylke - 50% • Alignment: • Extrinsics calibration • Homography between depthmap and color image • CPU implementation • JBU • Separable kernel • Bilateral grid • Derek - 50% • Alignment: • 3d point cloud tesselation • Reprojection into high-res camera • Median filter • GPU implementation of upsampling • 3D results with texture Hylke Buisman and Derek Chan Supervisor: Christian Theobalt