Download
1 / 1
30 likes | 167 Views
ILS: Instant Localization System for Underwater Mobile Networks. Youngtae Noh, Joshua Joy, Prerna Vij, Dony George, Mario Gerla UCLA, Computer Science {ytnoh, jjoy, prernavij, donyg, gerla}@cs.ucla.edu. Existing localization schemes: Require at least three ships/sonobuoys on surface

E N D
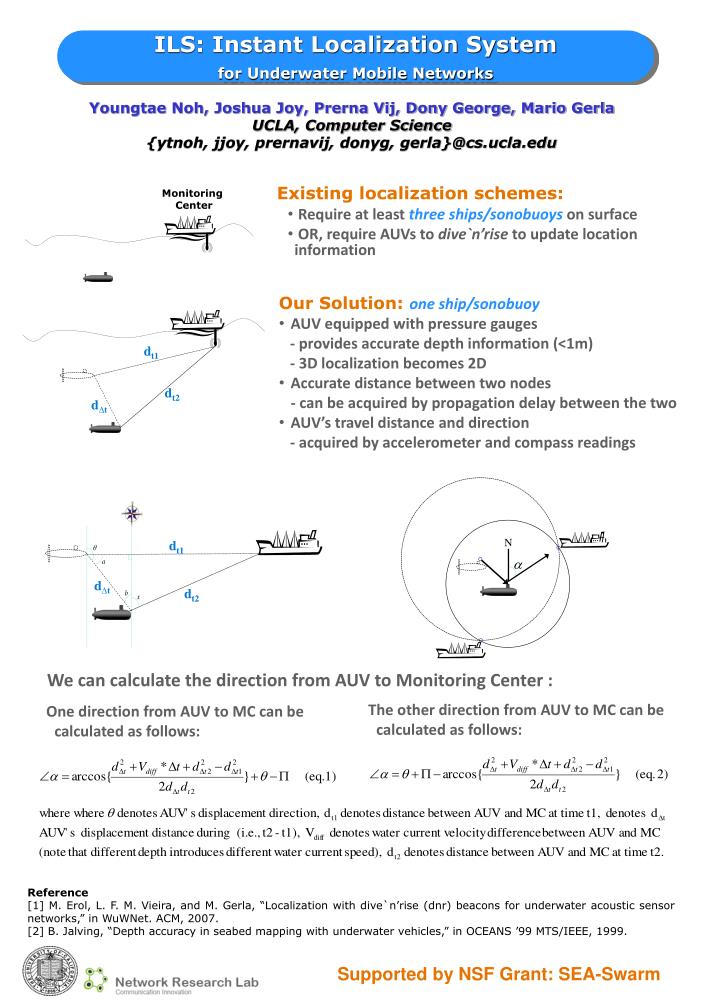
ILS: Instant Localization System for Underwater Mobile Networks Youngtae Noh, Joshua Joy, Prerna Vij, Dony George, Mario Gerla UCLA, Computer Science {ytnoh, jjoy, prernavij, donyg, gerla}@cs.ucla.edu • Existing localization schemes: • Require at least three ships/sonobuoys on surface • OR, require AUVs to dive`n’rise to update location information Monitoring Center • Our Solution: one ship/sonobuoy • AUV equipped with pressure gauges • - provides accurate depth information (<1m) • - 3D localization becomes 2D • Accurate distance between two nodes • - can be acquired by propagation delay between the two • AUV’s travel distance and direction • - acquired by accelerometer and compass readings dt1 dt1 d∆t dt2 dt2 d∆t N We can calculate the directionfrom AUV to Monitoring Center : One direction from AUV to MC can be calculated as follows: The other direction from AUV to MC can be calculated as follows: Reference [1] M. Erol, L. F. M. Vieira, and M. Gerla, “Localization with dive`n’rise (dnr) beacons for underwater acoustic sensor networks,” in WuWNet. ACM, 2007. [2] B. Jalving, “Depth accuracy in seabed mapping with underwater vehicles,” in OCEANS ’99 MTS/IEEE, 1999. Supported by NSF Grant: SEA-Swarm