Download
1 / 1
10 likes | 137 Views
Laser. Acoustic Burst 3. Surface. Acoustic Burst 1. Acoustic Burst 4. Acoustic Burst 2. Acoustic Burst 5. Under Water Positioning with Lasers. Luiz Filipe M. Vieira, Uichin Lee, Youngtae Noh, Mario Gerla Computer Science Department University of California, Los Angeles.

E N D
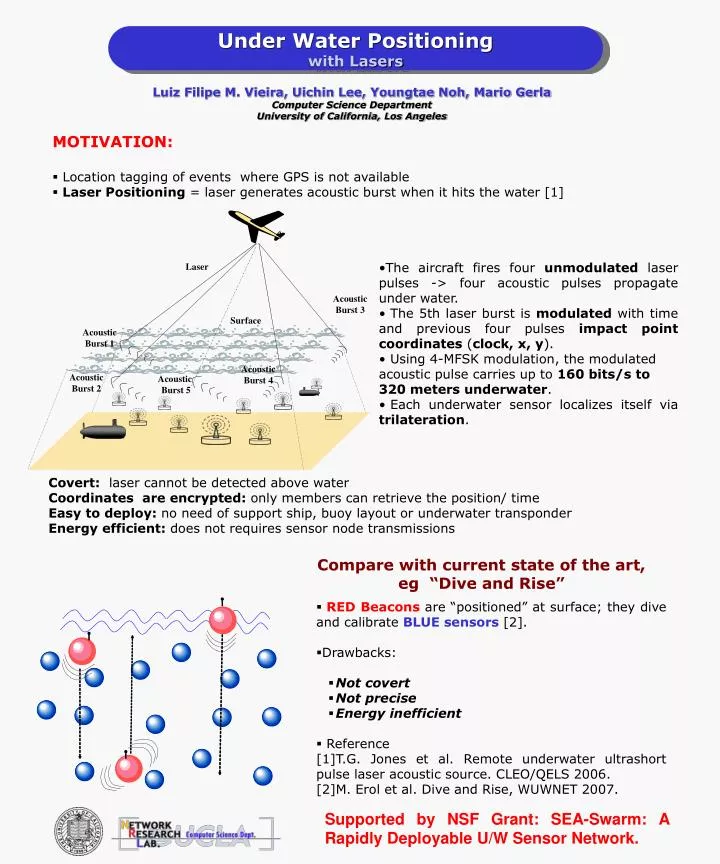
Laser Acoustic Burst 3 Surface Acoustic Burst 1 Acoustic Burst 4 Acoustic Burst 2 Acoustic Burst 5 Under Water Positioning with Lasers Luiz Filipe M. Vieira, Uichin Lee, Youngtae Noh, Mario Gerla Computer Science Department University of California, Los Angeles • MOTIVATION: • Location tagging of events where GPS is not available • Laser Positioning = laser generates acoustic burst when it hits the water [1] • The aircraft fires four unmodulated laser pulses -> four acoustic pulses propagate under water. • The 5th laser burst is modulated with time and previous four pulses impact point coordinates (clock, x, y). • Using 4-MFSK modulation, the modulated acoustic pulse carries up to 160 bits/s to 320 meters underwater. • Each underwater sensor localizes itself via trilateration. Covert: laser cannot be detected above water Coordinates are encrypted: only members can retrieve the position/ time Easy to deploy: no need of support ship, buoy layout or underwater transponder Energy efficient: does not requires sensor node transmissions Compare with current state of the art, eg “Dive and Rise” • RED Beacons are “positioned” at surface; they dive and calibrate BLUE sensors [2]. • Drawbacks: • Not covert • Not precise • Energy inefficient • Reference [1]T.G. Jones et al. Remote underwater ultrashort pulse laser acoustic source. CLEO/QELS 2006. [2]M. Erol et al. Dive and Rise, WUWNET 2007. Supported by NSF Grant: SEA-Swarm: A Rapidly Deployable U/W Sensor Network.