Download
1 / 20
200 likes | 410 Views
SPEAR 3 Beam Stability and Stabilization R. Hettel NSLS-II Stability Workshop April 18-20, 2007. Acknowledgments. Primary developers: T. Straumann: real-time processing, system architecture and communication A. Terebilo: accelerator physics, system operation development

E N D
SPEAR 3 Beam Stability and Stabilization R. Hettel NSLS-II Stability Workshop April 18-20, 2007
Acknowledgments Primary developers: T. Straumann: real-time processing, system architecture and communication A. Terebilo: accelerator physics, system operation development J. Sebek: turn-turn BPM processing D. Martin: BPM systems F. Rafael, G. Leyh: corrector power supply development Main contributors: S. Allison J. Corbett R. Hettel E. Medvedko G. Portmann T. Rabedeau J. Safranek C. Wermelskirchen E. Daly, N. Kurita, J Langton, A. Ringwall, J. Tanabe (SPEAR 3 mech des) EDM electrical support group R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
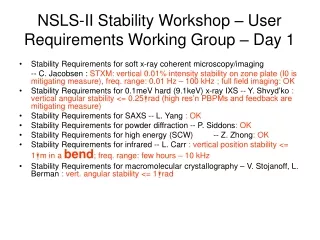
Stability Requirements • Stability requirements for small beams may be relaxed if beam size at experiment is limited by beam line optics (e.g. mirror slope error, point-spread function, etc.) • Stability requirements depend on time interval R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
Stability Time Scales • Disturbance time scale << experiment integration time: • Orbit disturbances blow up effective beam and , reduce intensity at experiment, but do not add noise • For / = cm/o < ~10%: ycm(rms) < ~0.3 y ycm(rms) < ~0.3 y' • Note: can have frequency aliasing if don't obey Nyquist…. • Disturbance periods experiment integration time: • Orbit disturbances add noise to experiment • For / = ~2cm/o <~10%: ycm(rms) < 0.05 y ycm(rms) < 0.05 y' • Disturbance periods >> experiment time (day(s) or more): • Realigning experiment apparatus is a possibility • Sudden beam jumps or spikes can be bad even if rms remains low • Peak amplitudes can be> x5rms level • Most demanding stability requirements: • Orbit disturbance frequencies approximately bounded at high end by data • sampling rate and a low end by data integration and scan times • noise not filtered out R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Mechanical Design • Short stiff girders and magnet supports (>20 Hz) • Chamber constrained vertically and horizontally at BPMs • Invar supports for key BPMs (~3 m/oC) • 18”-24” concrete floor • Tunnel temp stable to ± ~1oC/day R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Electrical Design – Power Supplies • Dipole: • stability: 50ppm (or better); 3 ppm/OC diurnal • ripple: 0.2% pk-pk of full output voltage ripple (DC-1 MHz) • chopper freq: 20 kHz • Quadrupole and Sextupole: • stability: 100 ppm; 6 ppm/OC diurnal • ripple: 0.2% pk-pk of full output voltage ripple (DC-1 MHz) • chopper freq: 40 kHz • Correctors: • stability: 500ppm; 30ppm/OC diurnal • noise: 17 ENOB, 0.001 Hz – 4 kHz • chopper freq: 40-60 kHz • DAC resolution/update rate: 24-bit (>18 bit for ± 1 mrad corrector) / 4 kHz • bandwidth: ~1 kHz • RF HVPS (90 kV) • stability: < 0.1% FS • ripple: < 1% pk-pk (<0.2% rms) above 60 kV • Power supply stability requirements depend on ring design R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
Bergoz MX-BPM (modified) • mux'd button processing (16 kHz) • ADCs sample baseband button signals (before internal analog position calc circuit) • SPEAR 3 version has: • 5 dB more input attenuation than standard module for 500 mA • wider IF filter to sample turn-turn orbit (2.2 MHz vs. 0.4 MHz) • ~2 mm res for injected beam (0.03 mA) 24 mm 18.8 mm 13 mm 34 mm 44.2 mm 12-mm diam buttons 84 mm SPEAR 3 BPMs and Processors • Echotek Digital Receivers • parallel I/Q processing of down-converted button signals (8 chan/module = 2 BPMs) • IF = 16.65 MHz (13 frev) • sample freq = 64.02 MHz (50 frev) • provision for simultaneous processing of test tone calibration signal • ~0.3-mm res for injected beam (0.03 mA) • 2-µm turn-turn resolution at >~10 mA • nanometer resolution in 100 Hz BW BPM processor temperature regulated to < ± 0.4oC pk R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 BPM Processing and Fast Orbit Feedback Note: SPEAR 3 was commissioned and operated until recently using slow orbit feedback running on MATLAB (Corbett, Portmann) R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
Static orbit correction 2 ea 100 Mb/s E’net no TCP/IP 100 Mb/s E’net broadcast no TCP/IP - S-1UT KPI x x V + Central CPU (1 GHz powerPC+altivec) 2 ea remote IOCs (+ phBPM IOC) 18 ea remote IOCs (8 correctors/IOC) xref SPEAR 3 Fast Orbit Feedback Dynamic orbit correction · 4 kHz update · latency (pipeline delay + deadtime) = 0.7-1 ms · RTEMS realtime OS · EPICS control and monitoring R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Orbit Motion • Distributed weak perturbations: • Uncorrelated small (~1μm) vibrations of individual magnets and supports cause orbit motion is concentrated in the modes with large singular values and frequency range 1-200Hz. • Localized strong perturbations: • Gap or phase changes in undulators occur on a ~1s time scale. Local feed-forward correction was implemented using ID trim coils, adjacent quads (tune) and skew quads (coupling). Cause global orbit distortions of a few m rms without FOFB. • Vehicle traffic on the overpass bridge causes slow (~1s) motion of the floor and microns of orbit instability. • RF power supply ripple inducing synchrotron oscillations FOFB correction of ID gap changes and bridge traffic effects. Based on 2 hours of averaged (0.5s) R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
RF HVPS ripple induces 0-mode longitudinal phase oscillations • Problem with RF HVPS causes extra oscillation amplitude @ 60 Hz nominal ripple: 0.4% rms of 70 kV 100 ms 4 ms SPEAR 3 Phase Oscillations and RF HVPS Ripple • Phase oscillations measured with turn-turn BPM: • 3.6 mrad rms = ~1.2 ps rms • bunch length = 17 ps rms • Working to implement mode-0 feedback R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Fast Orbit Feedback – Bandwidth Fast orbit feedback in operation since June, 2006. Integrator loop gains set conservatively for start of operations. Studies ongoing to find optimal tuning. FOFB effect on distributed weak wide bandwidth perturbations. Based on 1s of 4kHz BPM data • Limiting factors: • Corrector field penetration in vac chamber • (copper with CuNi inlays for bandwidth to ~200 Hz) • Time delay - 3 clock cycles R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Fast Orbit Feedback - Eigenmodes Ignoring even a single eigenmode results in gradual buildup of error: • Uncorrected orbit error from ‘real’ sources • ‘Spilling’ from other modes accumulating in corrector magnets Eigenmode spectrum R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
integrator bandwidths for different eigenmodes SPEAR 3 Fast Orbit Feedback – Eigenmodes – cont. • When modal Ki and Kp gains are tuned to reduce motion seen by in-loop electron BPMs, out-of-loop photon BPMs suffer • Feedback gain/BW is reduced for higher eigenmodes to reduce orbit noise but to still allow modal “mop-up” R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Photon Monitor Feedback • Vertical motion at photon BPMs (~15-20 m from source) not included in feedback can be 10s of microns even though stability shown by electron BPMs is <1 m • “Beam Line Dynamic Steering” (BLDS) has been introduced: • Response of photon BPMs to a local angle bump in 2 electron BPMs is measured offline • Photon BPM data averaged for 1 min for each beamline • Once a minute apply calculated correction to the electron BPM FOFB target. • BLDS is not perfect: 1 degree of freedom does not exactly correct source motion; combination of position and angle could be tuned to maximize performance • FOFB architecture allows to bring in pBPM data at • 4 kHz rate and response matrix can be extended to include pBPMs • Practical issue for including pBPMs in response matrix: need to reconfigure matrix (add/remove rows) on the fly when beam lines open and close R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
focus 1.4 m rms source 17.3 m rms Beam Line Mirror FeedbackT. Rabedeau, SSRL • error signal obtained from position sensitive detector near beam focus • error signal used to control piezo high voltage • piezo provides mirror fine pitch control with typical full range of motion +/- 30 rad or +/- 0.6mm or more focus motion. R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Fast Orbit Feedback – Operator Interface R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
RF frequency (green) changes ~30 Hz twice daily from lunar tide (9oC pk-pk outside diurnal temperature over 4 days shown in violet) 2oC RF frequency (green) changes by 1 kHz (C/C = ~0.5 mm/234 m) for a 2oC tunnel temperature variation (red) over 1 month period RF Frequency Feedback R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
Floor monument changes in first year of operation • HLS (Georg Gassner) • Data correlation analysis over 1 year suggests external temperature is the main factor for short term floor movement, not the internal temperature of the tunnel. • More HLS sensors to be added SPEAR Floor Motion R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007
SPEAR 3 Orbit Stability and Feedback – Future Development • Plan to characterize diurnal instability of floor, ring and beam line components using high resolution sensors (HLS, etc). This information might be included in feedback/feedforward • Studying to potential improvement gained by adding a roof over SPEAR (and possibly subsequent air conditioning) • Beam line dynamic steering to be integrated into FOFB • Better photon monitors are being developed • More parallel BPM processors will be added (will pay attention to new SLS/DESY design) • Plan to continue developing feedback to incorporate ring and beam line sensors and actuators R. Hettel SPEAR 3 Orbit Stability and Stabilization NSLS-II Stability Workshop April 18-20, 2007