Download
1 / 25
250 likes | 367 Views
Control Backstepping para el tratamiento de pacientes contagiados por el Virus de Inmunodeficiencia Humana (VIH-1). Autores: Ríos B., Miguel Cegarra A., Layimar. Introducción. El SIDA, descubierto en 1981, presenta tres fases distinguibles:

E N D
Control Backstepping para el tratamiento de pacientes contagiados por el Virus de Inmunodeficiencia Humana (VIH-1) Autores: Ríos B., Miguel Cegarra A., Layimar
Introducción • El SIDA, descubierto en 1981, presenta tres fases distinguibles: • Seroconservación: El virus se multiplica en el cuerpo muy rápido. Síntomas inespecíficos parecidos a la gripe. • Asintomática: Disminución de las células T CD4+. • Infección Crónica: Defensas críticamente debilitadas. • Modelos matemáticos propuestos: Perelson y Nelson 1999, Campello 1999. • El modelo considerado para el diseño de la ley de control está dado por Campello (1999).
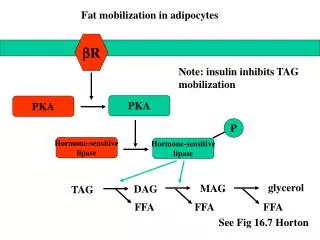
Descripción del modelo matemático • Virus de Inmunodeficiencia Humana (VIH) Retrovirus que ataca a las células CD4 y entra en ellas, formando una célula humana llamada Provirus a partir de la cual se forman nuevas copias del virus. Paulatinamente el número de células CD4+ disminuye, por lo que la persona sufre de inmunodeficiencia. Un objetivo del tratamiento antirretroviral el reducir la caga viral a un valor indetectable (< 50 copias/ml). • Linfocitos CD4 Son células defensivas del organismo. Los linfocitos CD4 son las células principalmente infectadas y destruidas por el VIH. Recuento de CD4 inferior a 200 células/mm3 de sangre significa que el VIH ha progresado a SIDA.
Descripción del modelo matemático El modelo del VIH desarrollado por Campello (1999) es: donde: - concentración de linfocitos T-CD4 en sangre (). - concentración de linfocitos T-CTL en sangre ( ). - cantidad de virus VIH en sangre ( ). - representan los valores de los estados y que corresponden a una condición saludable. - La variable es la ley de control.
Descripción del modelo matemático Los parámetros se definen en la tabla 1. Tabla 1: Parámetros del Modelo del VIH (Espinoza et al., 2008).
Puntos de Equilibrio • Punto de Equilibrio 1: Condición de no infección. • Punto de Equilibrio 2: Condición de infección.
Puntos de Equilibrio • Punto de Equilibrio 3: Condición de infección con presencia de tratamiento. La evolución de los estados del sistema (1)-(3), con y se muestra en la figura 1.
Figura 1: Evolución de los estados del modelo del VIH sin entrada de control.
Diseño del controlador Backstepping Considere el sistema de la forma: Aplicando la transformación de entrada: se transforma (16) en un integrador puro El control por Backstepping para (15)-(16) viene dado por: con , y la función de Lyapunov total es:
Diseño del controlador Backstepping Se reescribe el sistema (1)-(3) como: La transformación de entrada es: Se propone: con
Diseño del controlador Backstepping La función de Lyapunov que se propone es: Haciendo satisface: viene dada por:
Diseño del controlador Backstepping El controlador por Backstepping es: La función de Lyapunov total es: Para las simulaciones se utilizó:
Control por Backstepping, iniciando el tratamiento en el año 1,5 Figura 2 : Estado x1 Figura 3: Estado x2 Figura 4: Estado x3 Figura 5: Señal de Control por Backstepping
Ley de Control por Realimentación de Salida Considere una clase de sistemas de la forma: con . Sólo y está disponible para realimentación. Consideremos una variable de desempeño: La proposición planteada en Karagiannis et al., (2003) permite encontrar una ley de control por realimentación dinámica de salida tal que las trayectorias del sistema sean acotadas y:
Ley de Control por Realimentación de Salida De la prueba de la proposición de Karagiannis et al., (2003), se obtiene que la dinámica en lazo cerrado viene dada por: El controlador dinámico por realimentación de salida es:
Ley de Control por Realimentación de Salida Sea el sistema (1)-(3) reescrito de la forma: Se define la variable de desempeño como: La dinámica del sistema en lazo cerrado es:
Control por Backstepping con Realimentación de Salida Utilizando
Control por Backstepping con Realimentación de Salida, iniciando en tratamiento en el año 1,5 Figura 6: Estado x1 real y estimado Figura 7: Estado x2 real y estimado Figura 8: Estado x3 Figura 9: Señal de Control
Actualizando mensualmente el tratamiento antirretroviral Se consideró: donde mesy k = 0, 1, 2, …, 240. • La señal de control es evaluada cada mes y se mantiene constante hasta el siguiente.
Control por Backstepping con Realimentación de Salida actualizando mensualmente el tratamiento e iniciándolo en el año 5. Figura 10: Estado x1 real y estimado Figura 11: Estado x2 real y estimado Figura 13: Señal de Control actualizada mensualmente Figura 12: Estado x3 real y estimado
Tabla 2 Comparación de las señales de control Backstepping, actualizadas continua y mensualmente.
Conclusiones • Los objetivos planteados se cumplieron arrojando resultados satisfactorios. • La metodología de diseño se basó en aplicar un principio de separación. • Simulaciones digitales demuestran que: • Los controladores diseñados cumplen con el objetivo propuesto. • Las leyes de control dinámicas lograr recuperar las propiedades estabilizantes de las leyes de control de información completa. • La actualización mensual del tratamiento no deterioró el desempeño del lazo de control.
Recomendaciones • Realizar un estudio del controlador diseñado incluyendo el efecto de la mutación del VIH. • Considerar intervalos de tiempos distintos a un mes para realizar la actualización del tratamiento. • Diseñar controladores por realimentación de salida considerando que algunos de los parámetros del sistema son desconocidos.
Bibliografía • Campello, F. (1999). Modeling the dynamics of HIV-1 and CD4 and CD8 Lymphocytes. IEEE Engineering in Medicine and Biology, 18(1):21–24. • COESIDA JALISCO. Recuperado de Para personas que viven con VIH: http://coesida.jalisco.gob.mx/atencion6.html • Espinoza, G., Palacios, E., Moreno, J. & Campos, D. (2008). Output Feedback Passivity-based Controlfor HIV-1 Treatment Scheduling. D.F, México. • González, O., Ríos, M. & Gómez, C. (2008). Control Adaptativo por Realimentación de Salida del Proceso Anaerobio de Tratamiento de Aguas Residuales. Mérida, Venezuela. • INFOSIDA. Recuperado de: http://www.infosida.es/ • bgdisplay.jhtml?itemname=cd4_and_viral_load_tests • JEDDY SIDA, Tratamiento Natural del Sida. Recuperado de: http://www.sidaperu.com/sida.php
Bibliografía • Karagiannis, D., Astolfi, A. y Ortega, R. (2003). Two results for adaptive output feedback stabilization of nonlinear systems. Automatica, 39:858–866. • Khalil, H. (1996). Nonlinear Systems (2da ed.). Pretince Hall. • NAM (National AIDS Manual). (2002). Recuperado de: http://www.aidsmap.com/es/docs/12A238F7-D452-4D08-91CD-117D8C09BFBF.asp • Palacios, E., y Campos, D. (2005). Análisis y Control de la Dinámica del VIH-1. D.F, México. • Palacios, E., y Campos, D. (2007). Control por Retroalimentación de la Salida para la reducción de la carga viral en un modelo de VIH-1. D.F, México. • Perelson, A. and Nelson, P. (1999). Mathematical analysis of HIV-1 dynamics in vivo. SIAM, 41(1):3-44. • Regueiro, J., López, C., González, S. & Martínez, E. (2003). Inmunología Biología y patología del sistema inmune (3a ed.). Madrid: Panamericana.