Download
1 / 1
10 likes | 159 Views
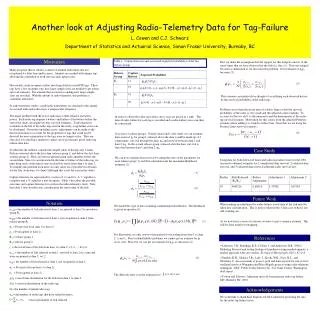
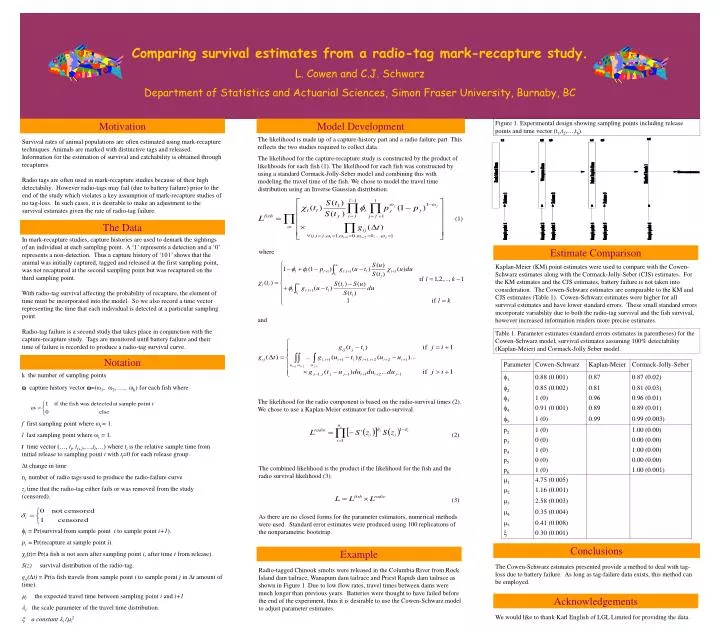
Comparing survival estimates from a radio-tag mark-recapture study. L. Cowen and C.J. Schwarz Department of Statistics and Actuarial Sciences, Simon Fraser University, Burnaby, BC. Figure 1. Experimental design showing sampling points including release points and time vector (t 1 ,t 2 ,…,t 6 ).

E N D
Comparing survival estimates from a radio-tag mark-recapture study. L. Cowen and C.J. Schwarz Department of Statistics and Actuarial Sciences, Simon Fraser University, Burnaby, BC Figure 1. Experimental design showing sampling points including release points and time vector (t1,t2,…,t6). Motivation Model Development The likelihood is made up of a capture-history part and a radio failure part. This reflects the two studies required to collect data. The likelihood for the capture-recapture study is constructed by the product of likelihoods for each fish (1). The likelihood for each fish was constructed by using a standard Cormack-Jolly-Seber model and combining this with modeling the travel time of the fish. We chose to model the travel time distribution using an Inverse Gaussian distribution. Survival rates of animal populations are often estimated using mark-recapture techniques. Animals are marked with distinctive tags and released. Information for the estimation of survival and catchability is obtained through recaptures. Radio tags are often used in mark-recapture studies because of their high detectabiliy. However radio-tags may fail (due to battery failure) prior to the end of the study which violates a key assumption of mark-recapture studies of no tag-loss. In such cases, it is desirable to make an adjustment to the survival estimates given the rate of radio-tag failure. (1) The Data In mark-recapture studies, capture histories are used to demark the sightings of an individual at each sampling point. A ‘1’ represents a detection and a ‘0’ represents a non-detection. Thus a capture history of ‘101’ shows that the animal was initially captured, tagged and released at the first sampling point, was not recaptured at the second sampling point but was recaptured on the third sampling point. With radio-tag survival affecting the probability of recapture, the element of time must be incorporated into the model. So we also record a time vector representing the time that each individual is detected at a particular sampling point. Radio-tag failure is a second study that takes place in conjunction with the capture-recapture study. Tags are monitored until battery failure and their time of failure is recorded to produce a radio-tag survival curve. Estimate Comparison where Kaplan-Meier (KM) point estimates were used to compare with the Cowen-Schwarz estimates along with the Cormack-Jolly-Seber (CJS) estimates. For the KM estimates and the CJS estimates, battery failure is not taken into consideration. The Cowen-Schwarz estimates are comparable to the KM and CJS estimates (Table 1). Cowen-Schwarz estimates were higher for all survival estimates and have lower standard errors. These small standard errors incorporate variability due to both the radio-tag survival and the fish survival, however increased information renders more precise estimates. and Table 1. Parameter estimates (standard errors estimates in parentheses) for the Cowen-Schwarz model, survival estimates assuming 100% detectability (Kaplan-Meier) and Cormack-Jolly Seber model. Notation k the number of sampling points capture history vector =(1, 2, …, k) for each fish where f first sampling point where i = 1. l last sampling point where i = 1. t time vector (…, tf, tf+1,…,tl,…) where ti is the relative sample time from initial release to sampling point i with tf=0 for each release group. t change in time nr number of radio tags used to produce the radio-failure curve zi time that the radio-tag either fails or was removed from the study (censored). i = Pr(survival from sample point i to sample point i+1). pi = Pr(recapture at sample point i). i(t)= Pr(a fish is not seen after sampling point i, after time t from release). S(z) survival distribution of the radio-tag. gij(t) = Pr(a fish travels from sample point i to sample point j in t amount of time). i the expected travel time between sampling point i and i+1 i the scale parameter of the travel time distribution. a constant i/i2 The likelihood for the radio component is based on the radio-survival times (2). We chose to use a Kaplan-Meier estimator for radio-survival. (2) The combined likelihood is the product if the likelihood for the fish and the radio survival likelihood (3). (3) As there are no closed forms for the parameter estimators, numerical methods were used. Standard error estimates were produced using 100 replications of the nonparametric bootstrap. Conclusions Example The Cowen-Schwarz estimates presented provide a method to deal with tag-loss due to battery failure. As long as tag-failure data exists, this method can be employed. Radio-tagged Chinook smolts were released in the Columbia River from Rock Island dam tailrace, Wanapum dam tailrace and Priest Rapids dam tailrace as shown in Figure 1. Due to low flow rates, travel times between dams were much longer than previous years. Batteries were thought to have failed before the end of the experiment, thus it is desirable to use the Cowen-Schwarz model to adjust parameter estimates. Acknowledgements We would like to thank Karl English of LGL Limited for providing the data.