Download
1 / 33
340 likes | 376 Views
Delve into the realm of automatic control, comparing actual output with desired, incorporating features like feedback and feedforward systems. Evaluate the pros and cons of proportional control, integral compensation, stability, and adaptive gain control, with examples in various domains such as medical monitoring and noise cancellation. Understand the significance of homeostasis and negative feedback systems in maintaining physiological stability.

E N D
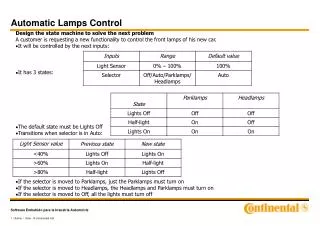
Automatic Control • Ballistic vs guided • Compare Actual Output to Desired Output • Automatic Gain Control (feedforward) • Negative feedback (desired – actual) = error • Op Amp as example of negative feedback • Use of SIMULINK [ F(s) represents f(t)… ] • Proportional control • Effects of transport delay • Integral control • Linear vs nonlinear control: Bang Bang • Adaptive gain control • Stability
Feedforward→ • Is there subtraction of actual from desired?No, it’s “then” subtracted from “now” … • Consider delay in one path: differentiation • AGC = Automatic Gain Control… • Or noise subtracted from signal+noise… • Examples: Fetal heart monitorMuffler-less exhaust: noise cancellation _ Delay line +
Automatic Control vs Homeostatics Automatic control is imagined to be carried out by sensors that transduce physical data into voltage; control itself is achieved by motors, heaters, pumps, and other electromechanical devices.To account for sensing and control by biological tissue and organs, physiologists use the term homeostatis. It implies that important physiological parameters need to be kept in limited, “static” ranges, by means of negative feedback. • Blood presssure (vessel dilation) • Blood sugar (insulin) • Potassium ions (actions in kidney) • Pupil diameter of the eye (light level, emotion) • Sense of balance (vestibular apparatus) • Temperature (metabolism, cooling by evaporation) • Stretch reflex (golgi tendon organs) • Intracellular cyclic GMP (phosphodiesterase enzyme activity)
Negative feedback output as a function of IN and G(S) Below: G(ain) = Plant + Compensation (control) Output is less than “open loop” but insensitive to changes in G, if G >> 1. G is an “internal” factor
Negative feedback with dynamics in F(s):(the problem of algebraic loops…) Let G be a large “algebraic” gain; the only dynamics is in F(s) Generating the inverse of a functionuse in “linearizing” a complex machine (motor)
Increase speed of response of LP filter with negative feedback And see fold23/SpeedChangeLPHP13.m for speed of HP filter in feedback Deriving exp(+at) Laplace transform www.biomathdynamics.com
Second order plantSpeed increase: with feedback as gain increases it becomes underdamped.
suppose the load changes suddenly, at t=0, from 0 to 2: a step of magnitude 2: instead of 2.0
open loop response;then place in (unity) negative feedback system • Stabilize a system: Let the input be an impulse function with L(δ(t)) = 1
Virtues of negative feedback: • system less sensitive to internal parameter changes • can be used to generate inverse to a transfer function • system less sensitive to external parameter changes • increase system speed • help stabilize an unstable system • What you’ve seen here is PROPORTIONAL control:Control effort proportional to error…
Vestibular Nystagmus as a marker of velocity storage • http://www.youtube.com/watch?v=jAE1hr_cLFw Notice quick phase of VN… Paroxysmal alternating skew deviation and nystagmus after partial destruction of the uvula A Radtkea, A M Bronsteina, M A Grestya, M Faldona, W Taylorb, J M Stevensb, P Rudgea
Example of a positive feedback loop inside a negative loop:Velocity storage in the VOR and optokinesis… Lcturs/vstopt05
First Top is increased by X4 with 0.75 gain + feedback then when “the lights are turned on” it reverts back to faster than normal
Example of feedback quiz http://www.brown.edu/Departments/Engineering/Courses/En123/Exams/FDBKquizes/FDBK06y.htm
Push-Pull Amplifier modelling vestibular recurrent inhibition
Example of op amp NGSA feedback • http://www.brown.edu/Departments/Engineering/Courses/En123/Lectures/FDBKopamp.htm
Transport delay • Flip side of conduction velocity • A “nonlinear” Laplace transform
Transport delay of a leaky integrator And see fold23/TransDly13.mdl
PID control: for inverted pendulum balance • Derivative compensation: predictive, but a way to amplify noise in system… • Motion-sensitive g-cells at retinal output… • see PoleSim_PID.mdl in work/PoleBal_10 • try modifying the D on PID→more D, better score. • fold23/PID_first_ord12.mdl • Approx deriv in Simulink: (s)/(s+a) at low freqa>>s=jᵚhttp://www.mathworks.com/help/simulink/slref/derivative.html
Bang bang—where is the feedback? • Bang-bang controller for…The Fan Lab: in LabVIEW • Always allowing the “actual” to drift between HI-LO limits
Adaptive Gain Control of VOR • neural network adapting to visual disturbance of VOR: Robinson JNP 1976: • http://jn.physiology.org/content/39/5/954.abstract?ijkey=127029d171b72a8dc8037f9bbcc8abb6ed3863c8&keytype2=tf_ipsecsha • 122JDD/Asgn06/II_VORgainMOD.htm • C:/MatlabR12/work/fold22/asg5B04.mdl • B. Widrow & Peter N. Stearns, Adaptive Signal Processing (1985)
Adaptive Gain Control:Learning to be a D→A converter • We, the designers of a D→A converter, figured out that resistors of size 1K, 2K, 4K and 8K would be required for a 4-bit conversion. • Think of the resistances as representing “gain” blocks of 1, 2, 4, 8 for LSB to MSB inputs. • Can the weight be learned, by training? • See code in script: • C:/MatlabR12/work/fold23/D2A_learn_2010.m • The weights start at random then are updated on each presentation of a learning stimulus/response pair. • ΔW(i) = input(i) * error ε * learning rate μHebb’s Law
Fuzzy Controllers • See description of Matlab Fuzzy Logic Toolbox • http://www.mty.itesm.mx/dtie/centros/csi/materias/ia4002-1/docs/Fuzzy_Toolbox.pdf • Application Examples: Inverted pendulum balancingnoise cancellationbacking up tractor-trailer truck to loading dockball juggling