Download
1 / 15
150 likes | 306 Views
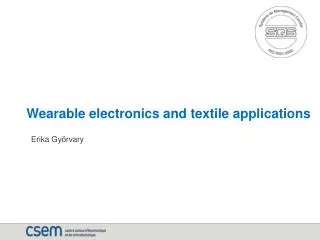
OmniTouch : Wearable Multitouch Interaction Everywhere . Chris Harrison Hrvoje Benko Andrew D. Wilson Presented by: Nesra Yannier. OmniTouch. Shoulder-worn depth -sensing and projection system

E N D
OmniTouch:Wearable MultitouchInteraction Everywhere Chris Harrison HrvojeBenko Andrew D. Wilson Presented by: Nesra Yannier
OmniTouch • Shoulder-worn depth-sensing and projection system • allows users to manipulate interfaces projected onto the environment (e.g., walls, tables), held objects (e.g., notepads, books), and their own bodies (e.g., hands, lap).
Related Work • Touch-based interactivity on arbitrary projected objects challenging • Generally requires a fixed non-tracking projection, calibration of object, or sensing within objects.
Related Work: SixthSense • pico-projectors has enabled a new class of worn, on-body projected interactive systems. • Finger tracking was achieved by wearing fingertip markers
Related Work: Skinput • Skinput - bio-acoustics to detect finger tap events on the skin. • main limitations: • lack of support for any surface other than the user’s body • inability to detect touch drag movements • lack of support for multitouch. • no surface tracking performed, fixed position of arm
Hardware 1) PrimeSense depth camera, Objects as close as 20cm can be imaged by this sensor. Kinect a minimum sensing distance of ~50cm did not work. 2) pico-projector 3) depth camera and projector mounted to metal frame, worn on the shoulders, and secured with a chest strap.
Finger segmentation: • Key contribution: no calibration or training of environment or user • take a depth map of a scene • compute the depth derivative in the X- and Y-axes • iterate over this derivative image, looking for vertical slices of cylinder- like objects.
Finger Click detection: • computing the midpoint of the finger path • flood fill towards the fingertip. • When the finger is hovering above a surface or in free space, the flood fill expands to encompass the entire finger. When the finger contacts a surface, the fill operation floods out into the connecting object.
Surface Segmentation and Tracking: • distinct surfaces are segmented by performing a 3D connected components operation on the depth map
Defining Interactive Areas 3 approaches: • use a surface’s lock point and orientation to provide an interface that tracks a surface. (fixed size; as big as the smallest surface) • The system automatically sizes, positions and tracks an interface given the available projection area describing the appropriate location for that surface. • The system lets the user define the interactive area.
Applications • phone keypad application • full keyboard, potentially allowing for text entry on the go • “post-it” application - write quick notes on palm • ubiquitous map panning and zooming- controlled by finger drags and pinching • painting application for walls – using left hand as the color pallet
User Study (12 participants) Finger Click Detection: • 96.5% correctly received exactly one finger click event. • 50 trials (0.8%) had no click event (the system missed the participant’s finger click) • 154 trials (2.5%) had two click events (the system incorrectly thought the user clicked twice) • 8 trials (0.1%) had three click events.
They found an average offset of 11.7mm to the left of targets across all conditions and participants • OmniTouchon a wall –as accurate as conventional touchscreens. • The arm is the least accurate surface– targets 70% larger than a touch screen to achieve the same 95% touch accuracy. • Dragging task - On average, participants deviated from the desired path by just 6.3mm.
Conclusion • OmniTouchcould be the size of a box of matches, worn as necklace or watch. • Goal: to demonstrate that touch input can be achieved on everyday surfaces, including the human body.
Discussion • Other applications? Is visual feedback necessary for this system? Visually Impaired? Combined with other multimodal interactions as well such as audio or haptic feedback? • How would the user save information in this system? For example when they annotate a document is it only for that moment or can they go back to it later? Would the system be able to recognize the documents? • The authors mention the concern about how comfortable people would be interacting with their bodies. Do you think it would be comfortable to use a system like this? If not, how could the system be modified to make it more comfortable for people to use?