Download
1 / 17
170 likes | 293 Views
Multiresolution stereo image matching using complex wavelets. Julian Magarey CRC for Sensor Signal and Information Processing. Anthony Dick Dept of Computer Science University of Adelaide. Stereo Vision Problem. A Stereo Pair. AIM: To recover 3D shape from stereo pair. Stereo Matching.

E N D
Multiresolution stereo image matching using complex wavelets Julian Magarey CRC for Sensor Signal and Information Processing Anthony Dick Dept of Computer Science University of Adelaide
A Stereo Pair AIM: To recover 3D shape from stereo pair
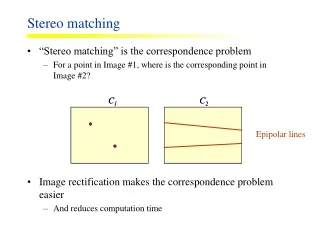
Stereo Matching • Find a point in each image which represents the same point in the scene • corresponding points corresponding points disparity
Feature Based Matching • Detect and match distinctive features • Problems • featureless areas • occluded features • same feature may appear different
Multiresolution Matching • Match points at several levels of detail Left Image MATCH MATCH MATCH FINE COARSE Right Image
Wavelet Transform Original Image Resolution i,j Level 1 Res i/2, j/2 Level 2 Res i/4, j/4
Multiresolution Matching • Now have multiresolution representation • Level m similarity distance measure: where x is a pixel in the level m representation of the left image x’ is a pixel in the level m representation of the right image
Similarity distance surface • Can extrapolate similarity surface about x’ where the surface minimum, the location of the surface minimum, a 2x2 curvature matrix, are derived from
Stereo Matching Algorithm • Now have basic matching algorithm • perform wavelet transform on images • minimise SD(x,x’) for all x at top level • use as starting point for finer level matching • What if top level match is wrong? • How do we interpolate matches to finer level?
Coping with Mismatches • Find a field of disparity vectors which minimises where is a directed measure of the difference between {u} and the unsmoothed disparity field is a measure of the uniformity of {u} is a scalar controlling their relative influence
Regularisation Features • Based on Anandan [IJCV, 1989] • Use curvature matrix κ to smooth more in directions of less certainty Smooth more in this direction Smooth less in this direction Similarity surface contours
Coarse-to-fine interpolation • Robust disparity interpolation A B a b c d C D = level m pixel = level m+1 pixel D(a) = choice of {D(A), D(B), D(C), D(D)} which minimises similarity distance
Results • Calibrated camera setup • Projective reconstruction • Form textured VRML surface 3D Surface C1 C2 Right Camera Left Camera
Conclusion • Future work • lighting • geometric constraint incorporation • colour images • camera self-calibration • more than two images • Already, results are promising!