Download
1 / 6
60 likes | 165 Views
Utilizing Under-Actuated Linkages for Robotic Grasping of an Asteroid. Asteroid Initiative Idea Synthesis Workshop November 21 , 2013. MDA On-Orbit Servicing Heritage. SARAH. S elf A daptive R obotic A uxiliary H and Developed by University Laval (patented)

E N D
Utilizing Under-Actuated Linkages for Robotic Grasping of an Asteroid Asteroid Initiative Idea Synthesis Workshop November 21, 2013
SARAH • Self Adaptive Robotic Auxiliary Hand • Developed by University Laval (patented) • MDA has a licence to develop technology for space applications
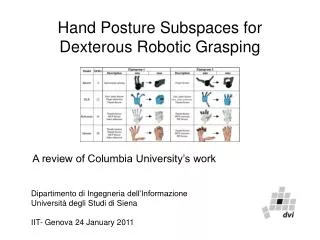
Under-actuation • The term under-actuated means that its geometry is not entirely defined by the drive actuation • There is only one driven joint per 'finger' at the base • The nature of the four-bar linkages separated by stable triangles causes the 'finger' to conform to shape that impedes motion • The shape of the grasped object is required to make the final geometry determinate
Under-Actuated Linkage Concept • Initial configuration held open by active and passive mechanisms • “fingers” ~ 10m (30 ft) in length • Final configuration of fingers defined by shape of object being grasped • Option for 3 to 5 fingers • Provides structure for EVA operations
Advantages of Proposed Concept • Deterministic configuration where required • Kinematics permits compact stowed volume • Allows continuous visual surveying – rendezvous to capture to surface ops • Reduces risks of snagging, abrasion and uncontrolled motion • Mass in same category as high-strength capture bag