Download
1 / 34
350 likes | 474 Views
COMPUTER NUMERIC CONTROL MACHINE. Team 24: F09-24-CNCMACHD. Team Members: James Williams (PM) Eric Blankenship Shawn Gossett Glenn Spiller Pat Brokaw Brian Hagene. FTA: Dr. Haibo Wang. Outline. Executive Summary James CNC Diagram J ames Machine Subsystems

E N D
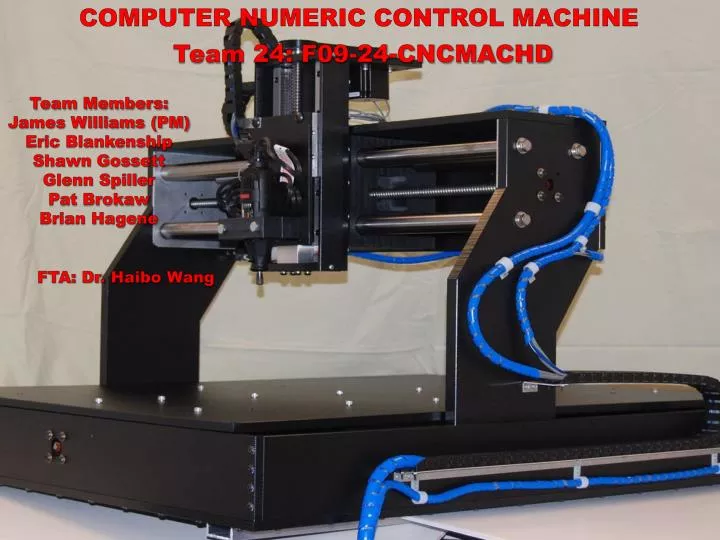
COMPUTER NUMERIC CONTROL MACHINE Team 24: F09-24-CNCMACHD Team Members: James Williams (PM) Eric Blankenship Shawn Gossett Glenn Spiller Pat Brokaw Brian Hagene FTA: Dr. Haibo Wang
Outline Executive SummaryJames CNC Diagram James Machine Subsystems • Mechanical Pat & Brian • Motor Drive Eric • Main Controller Glenn • Pendent Shawn Cost Breakdown James Implementation ScheduleBrian Summary Brian Acknowledgements
Executive Summary Project Objective • A CNC Machine that can be used not only by manufacturers but also by small scale hobbyists at costs much less than competitors. • Three forms of communication either through serial port, Ethernet, or USB jump drive • Controllable through a specially designed hand pendant • Multiple tool heads for different applications including milling, paste dispensing, and air brushing • Able to move at high speeds with longer working life compared to other relative machines Why Needed • Other machines perform only one specific task • Loading different programs by current methods result in longer machine down times and loss in revenue.
Mechanical Subsystem Base X Axis Y Axis Z Axis
Mechanical Subsystem Base • Table Specifications: • Table Work Area: 1160 in2 • Maximum Part Weight: +18 lbs • Table Supported by Rail: 0.375 in x 1 in • Y-Axis Rail Design: • Length: 38 in • Weight Supported: 40 lbs • Length and Weight was significant • Guide system selected: Supported rail Y Axis
Mechanical Subsystem X Axis • Designed Considerations: • 5.5 lb cutting force • 10 lb tool head • 100 lb.in moment due to weight • 75 lb.in moment due to cutting force • Design Specifications: • X-Rod Diameter: 1.18 in (30mm) • Rod Spacing: 4 in • Supports 37.8 lbs/rod • Maximum deflection: 0.001 in • System Loads: • 26.70 lbs, 15.63 lbs, 22.53 lbs • Alternative Design: • 4 Rods with 15.63 lbs/rod • Rod Diameter : 1 in • Cost increases
Mechanical Subsystem Z Axis • Z-Axis Design Considerations: • Minimize moment about x-axis ballscrew • Guide system selected: Versa rails • Moves tool head closer to center of x-axis • Alternative Design: • 2 Guide Rods • Increases moment
Mechanical Subsystem • Ballscrew Drive Specifications: • Lead: 0.2 in/rev • Diameter: 5/8 in • Supports: Ball bearing & Thrust bearing block assembly • Thrust Forces: • Acceleration 28.9 lbs • -Static friction and acceleration force • Constant Velocity 18.8 lbs • -Only kinetic friction
Mechanical Subsystem • Tool Head Options: • Spindle • Paste dispenser
Motor Drive Assembly • Purpose: Power Motors to drive ballscrews, providing motion in 3 dimensions
Motor Design Requirements • Provide a minimum 20oz.in of torque at a speed of 4 in/sec. Required to move each axis. • Be cable of providing a minimum torque safety factor of 100%.
Motor Specifications Motor sizes: • 276 oz.in (X-axis & Y-axis) • 166 oz.in (Z-axis) Motor Requirements: • 2.8 amps/phase • Voltage of approx. 48 volts for a torque of 80oz.in at 4in/sec.
Motor Driver Considerations Requirements: • step and direction inputs to move motors • Cable of driving motors at a minimum of 2.8 amps. • Surface mount chips to save space. Selected: • Allegro A3986 [micro-stepping sequencer]
Motor Driver Considerations Other design requirements • Low power dissipation: Mosfet H-Bridge with very low on resistance. (.050 ohm) • Current sense resistor: very low resistance (.043 ohms) • Traces :2 oz vs. 1 oz copper. • To Provide low trace inductance to reduce high voltage spikes from destroying chips. Provide low power dissipation for motor traces. • Power Transformer selection: provide power to motors that would fit into small cabinet with minimum stray magnet fields. • System monitoring and fault identification: fuses and LEDs added to aid trouble shooting and protect circuit
Motor Drive Subsystem Motor Drive Subsystem • Features • Pulse width modulation, MOSFET H-Bridge • Motor size from 2 to 4.7 amps • Optical Isolation for all inputs • Full, Half, 1/4, 1/16 step resolution • Over Current Protection • Over temperature and under voltage protection • Fuse Blown Indicators (3 LED’s) • 5 V supply Good LED • Outputs to Controller • Drive Board Ready Signal • Drive Board Fault Signal • Motor Power Supply Ready Signal
Main Controller Subsystem • Ethernet Microprocessor • ENC624J600 (Microchip Technology) • Communication Controller • PIC24FJ256GB110 (Microchip Technology) • Motion Controller • PIC24HJ256GP610 (Microchip Technology) PIC24HJ256GP610 PIC24FJ256GB110 ENC624J600
PIC24FJ256GB110 • 24 bit 100 pin micro-processor is used to control the communications for the CNC. • Any data that comes into the the Controller board goes thorough the Communication micro controller. • Specific requirements: • 1 – SPI • 2 – UART • 8 – Data Pins • 16– Address Pins • Connections to the Com controller: • RS232 • Serial • USB to Go • Ethernet • VGA(Output)
ENC624J600 • 64 pin micro-controller specifically for Ethernet implementation. • No programming was needed for this chip. It comes pre-configured to take Ethernet data. This micro chip connects directly to the Com Controller • Specific Requirements: • 1 – SPI • External Connections: • RJ45 Connector
PIC24HJ256GP610 24 bit micro-controller used to take the data from the communication micro chip and distribute Data to the motor driver board. Specific Requirements: 2 – SPI (to communication) 1 – UART (to Pendent) 8 – Data Input Pins 4 – External Interrupts
Interconnects from the main controller to the motor driver board.
Pendent Subsystem Case Screen
Pendent Subsystem • Requirements • LCD Screen • Four buttons for accessing different function screens, accepting a command, canceling a command, and switching the axis between y and z on up and down directional buttons • Four buttons to change direction on x, y, or z axes • Feed pot dial to increase or decrease feed/speed rates
Pendent Subsystem • Casing • Upper section will have a width of 5 inches and a length of around 2.5 inches • Placement for LCD Screen, Function button, Accept Button, Cancel Button, Axis Switch Button, and Feed Pot Override • Lower section will have a width 3 inches and a length of 3.5 inches • Placement for X, Y, and Z directional buttons
Pendent Subsystem • System Diagram • LCD Screen • PIC 24 Microcontroller • DB9 and MAX32 • Receive and transmit information from main controller system to pendant system • Voltage Regulator • Input of 5 volts to make controlled output of 3.3 volts • Feed pot/Potentiometer • Control of feed/speed rate • Clock chip • Steady, constant flow of information • Switch buttons
Pendent Subsystem • PCB Layout • Top Layer • LCD Screen • Top four buttons are function, accept, cancel, and axis switch • Bottom four buttons are four axis direction movement • Left and right control x axis • Top and bottom control y or z axes • Bottom Layer • Remaining Components • Tightly packed to prevent losses • Connector at bottom to attach to main controller system
Pendent Subsystem • Screens • Main Screen • Upper left box contains current x, y, z, and acceleration axes • Lower left box contains circles for limit switches which will either be red/green to show on/off • Upper right box contains current adjustment of feed pot ranging from +-50 % of the rated value • Lower right box displays the current state of the machine which can be jog, idle, or run • Other Screens • All Sub Screens • Offsets Screens- Home, Park, Work Offset 1, Work Offset 2 • Soft Limits Screens- Upper and Lower • Parameters Screens- Machine Parameters, TCP/IP Configuration, Communications Port • Flash Drive Screen
Costs • The Mechanical Total comprises of: • Frame • Bolts • Ballscrews • Rods • Shafts • The Electrical Total comprises of: • Circuit Chips • Driver Boards • Controller Boards • Pendent
Implementation Schedule Each component requires different time frames to finish each subassembly. The construction is simple once all subassemblies are finished, and the machine can be fully assembled in a 4 hour period with a three man team. The machine is ready for operation after testing is complete.
Summary Looked at the Machine Layout Went through the Subsystems and Considerations – Mechanical – Motor Driver – Main Controller – Pendent Went over detailed Cost Breakdown Looked at Implementation Schedule
Acknowledgements • Dr. Haibo Wang- Faculty Technical Advisor • Mr. Mark Hopkins- Technician/ Field Engineer for Allegro Micro-devices • Mr. Howard Everton- President of Norva Plastics • Barb Saathoff- Representative from Dytronix • Tim Attig- Mechanical Shop Machinist