Download
1 / 1
10 likes | 107 Views
Aim Take advantage from intelligent cooperation between mobile robots, so as to build fast and accurate 3-D maps of unknown environments, through efficient information sharing based on information utility.

E N D
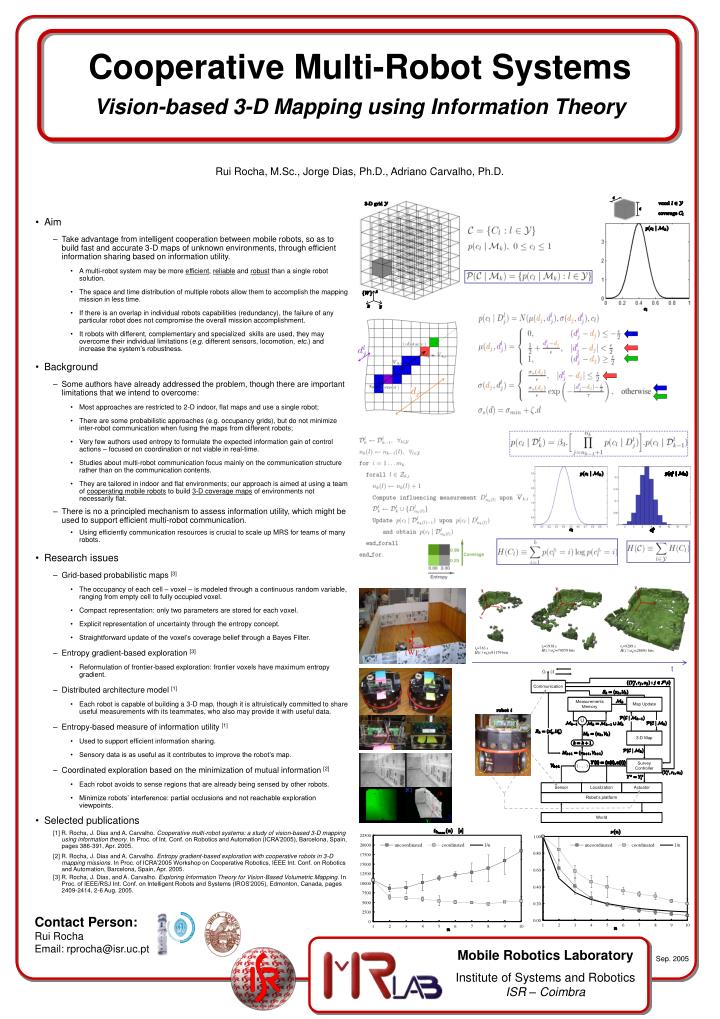
Aim Take advantage from intelligent cooperation between mobile robots, so as to build fast and accurate 3-D maps of unknown environments, through efficient information sharing based on information utility. A multi-robot system may be more efficient, reliable and robust than a single robot solution. The space and time distribution of multiple robots allow them to accomplish the mapping mission in less time. If there is an overlap in individual robots capabilities (redundancy), the failure of any particular robot does not compromise the overall mission accomplishment. It robots with different, complementary and specialized skills are used, they may overcome their individual limitations (e.g. different sensors, locomotion, etc.) and increase the system’s robustness. Background Some authors have already addressed the problem, though there are important limitations that we intend to overcome: Most approaches are restricted to 2-D indoor, flat maps and use a single robot; There are some probabilistic approaches (e.g. occupancy grids), but do not minimize inter-robot communication when fusing the maps from different robots; Very few authors used entropy to formulate the expected information gain of control actions – focused on coordination or not viable in real-time. Studies about multi-robot communication focus mainly on the communication structure rather than on the communication contents. They are tailored in indoor and flat environments; our approach is aimed at using a team of cooperating mobile robots to build 3-D coverage maps of environments not necessarily flat. There is no a principled mechanism to assess information utility, which might be used to support efficient multi-robot communication. Using efficiently communication resources is crucial to scale up MRS for teams of many robots. Research issues Grid-based probabilistic maps [3] The occupancy of each cell – voxel – is modeled through a continuous random variable, ranging from empty cell to fully occupied voxel. Compact representation: only two parameters are stored for each voxel. Explicit representation of uncertainty through the entropy concept. Straightforward update of the voxel’s coverage belief through a Bayes Filter. Entropy gradient-based exploration [3] Reformulation of frontier-based exploration: frontier voxels have maximum entropy gradient. Distributed architecture model [1] Each robot is capable of building a 3-D map, though it is altruistically committed to share useful measurements with its teammates, who also may provide it with useful data. Entropy-based measure of information utility [1] Used to support efficient information sharing. Sensory data is as useful as it contributes to improve the robot’s map. Coordinated exploration based on the minimization of mutual information [2] Each robot avoids to sense regions that are already being sensed by other robots. Minimize robots’ interference: partial occlusions and not reachable exploration viewpoints. Selected publications [1] R. Rocha, J. Dias and A. Carvalho. Cooperative multi-robot systems: a study of vision-based 3-D mapping using information theory. In Proc. of Int. Conf. on Robotics and Automation (ICRA’2005), Barcelona, Spain, pages 386-391, Apr. 2005. [2] R. Rocha, J. Dias and A. Carvalho. Entropy gradient-based exploration with cooperative robots in 3-D mapping missions. In Proc. of ICRA’2005 Workshop on Cooperative Robotics, IEEE Int. Conf. on Robotics and Automation, Barcelona, Spain, Apr. 2005. [3] R. Rocha, J. Dias, and A. Carvalho. Exploring Information Theory for Vision-Based Volumetric Mapping. In Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS’2005), Edmonton, Canada, pages 2409-2414, 2-6 Aug. 2005. 22500 20000 17500 15000 12500 z 10000 7500 y tk=763 s H(C | Mk)=91179 bits tk=1938 s H(C | Mk)=70059 bits tk=9289 s H(C | Mk)=28691 bits x 5000 {W} 2500 t 0 1 2 3 4 5 6 7 8 9 10 1.00 0.80 0.60 0.40 0.20 0.00 1 2 3 4 5 6 7 8 9 10 uncoordinated uncoordinated coordinated coordinated 1/n 1/n Cooperative Multi-Robot SystemsVision-based 3-D Mapping using Information Theory Rui Rocha, M.Sc., Jorge Dias, Ph.D., Adriano Carvalho, Ph.D. Contact Person: Rui Rocha Email: rprocha@isr.uc.pt Sep. 2005