Download
1 / 114
1.48k likes | 2.12k Views
Multi-Robot Systems. “The mob has many heads but no brains”. -- English Proverb. Today's’ Objectives. To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots

E N D
Multi-Robot Systems “The mob has many heads but no brains”. -- English Proverb.
Today's’ Objectives • To understand some of the problems being studied with multiple robots • To understand the challenges involved with coordinating robots • To investigate a simple behaviour-based self-organization strategy for a common application • To investigate a simple communication strategy
Why Multiple Robots? Faster execution More robust Simplify design of robots Task requires it larger range of task domains greater efficiency improved system performance fault tolerance lower economic cost ease of development ??? distributed sensing and action
Why Not Multiple Robots? More communication More complexity Harder to test N x the trouble Expensive Performance depends on issues involving interaction between robots Interactions complicate development Difficult to model group behaviors from top down (i.e., centralized control) when environment is unknown and/or dynamic Sensor and/or physical interference
Research • 5 major themes of robot group research: • Group control architecture - decentralization and differentiation • Resource conflict resolution - e.g., space sharing • Origin of cooperation - i.e, genetically−determined social behavior or interaction−based cooperative behavior • Learning - e.g., control parameter tuning for desired cooperation • Geometric problem solving - e.g., geometric pattern formation A typical research paper will focus on only one theme (or aspect) of group robotics.
Research • What kinds of problems have been studied: • Multi-robot path planning • Traffic control • Formation generation, keeping and control • Target tracking • Multi-robot docking • Box-pushing • Foraging • Multi-robot soccer • Exploration and localization • Transport
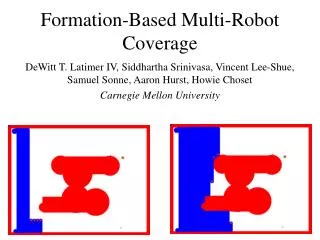
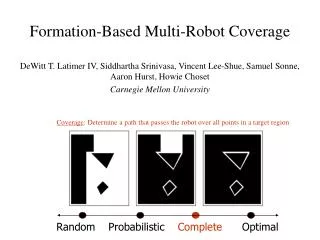
Example research in multi-robot systems (UPenn) Formations (CMU) Mapping (CMU) Soccer
More example research in multi-robot systems … iRobot Swarms (Dartmouth/MIT) Reconfiguration (USC) Mapping (U. Tennessee) Mobile Sensor Net Deployment
Terminology • Various rather interchangeable terms are used: • Group behavior / robotics • Collective behavior / robotics • Cooperative behavior / robotics • Swarm robotics • Multi-robot systems • Popular and recent area of study due to wide-range of possible application areas
Cooperative vs. Competitive • Cooperative: • picking up a heavy load • Competitive: • RoboSoccer Recently, more focus on cooperative form not competitive.
Why Multiple Robots? • Some tasks require a team • Robotic soccer • Some tasks can be decomposed and divided for efficiency • Mapping a large area • Many specialists preferable to one generalist • Increase robustness with redundancy • Teams of robots allow for more varied and creative solutions
Multi-robot Application Areas • Automated warehouse management • Automatic Guided Vehicle (AGV) Systems • Planetary exploration • Automatic construction • Robotic cleanup of hazardous sites • Agriculture • Military Applications • RoboCup
Typical Tasks for Multi-Robot Teams - I • Mapping and exploration • Hazardous clean-up • Reconnaissance • Tracking Loosely-coordinated Map created by robot team.
Typical Tasks for Multi-Robot Teams - II • Carrying objects • Robot soccer • Large-scale construction • Constrained exploration • Coordinated Reconn. Tightly Coordinated Robotic Construction. Box Carrying
Pittsburgh LA Houston New York Chicago Analogy with Traveling Salesman Problem (TSP) • Lots of cities, lots of salesmen • Distribute cities to salesmen so total distance is minimized. • What domains have TSP?
Robot Task Allocation • How do we assign the cities (tasks) to the salesmen (robots)? Ideas?
Motion Coordination • Lots of types of motion coordination: • Relative to other robots: • E.g., formations, flocking, aggregation, dispersion… • Relative to the environment: • E.g., search, foraging, coverage, exploration … • Relative to external agents: • E.g., pursuit, predator-prey, target tracking … • Relative to other robots and the environment: • E.g., containment, perimeter search … • Relative to other robots, external agents, and the environment: • E.g., evasion, soccer …
Foraging • Consider a common problem studied in robotic colonies, foraging: • gathering/collecting items - possibly bringing them to some specific location(s) (e.g., to particular room) or general locations(s) (e.g., to outer walls). • there are many variations of this problem • Consider a specific instance: • robots can detect when it finds an item and can push it to some location (or pick it up and drop it off). • robots will be encoded with a fixed, instinctive behavior and thus will not learn “how” to forage.
Foraging • Consider allowing robots to move randomly in an environment with no cooperation. • Robots must find forage items (e.g., when passing over them) and bring them to the boundaries. • Robots may collide, which may interrupt the forage procedure of a robot. • Eventually, over time, each forage item will be found by some robot:
Foraging • As more robots are used, the speed of forage completion increases. • The performance decreases when the forage items are not evenly distributed. • this is because robots are not directed towards forage items, only finding them by chance.
Foraging • Intuitively, performance can be improved by: • reducing collisions (or interference) between robots • preventing robots from traveling over the same areas • directing robots towards clusters of forage items • The obvious way of reducing collisions and preventing duplicate travel is to distribute robots by explicitly assigning each one a particular area in the environment in which to forage. • environment broken down into “equal−sized” areas which are assigned to individual robots
Foraging – Explicit Distribution • This strategy has advantages: + ensure even distribution of robots - good when items to be foraged are evenly distributed randomly + minimizes sensor interference and physical collisions between robots • and disadvantages: - requires robots to “know” and maintain specific positions - requires knowledge of environment - expensive sensors ?? (e.g., GPS) - expensive computation (e.g., position estimation) - can be inefficient if forage items are clustered
Foraging – Explicit Distribution • A simple way of determining the foraging areas for each robot is to base the regions on the dual graph: Recursively divide dual graph in “half” until number of regions matches the number of robots: Each robot remains in its own designated area.
Foraging – Explicit Distribution • Performance (i.e., speed of forage completion) is highly dependant on shape of environment and location of forage items. With clustered forage items, most robots become useless if forced to remain in a particular area. With forage items evenly distributed, robots work effectively in near optimal configuration, provided that robots do not have to leave their environment to complete the task.
Foraging – Implicit Distribution • Clearly, fixing the locations of each robot may not be the best choice if: • the distribution of forage items is not known to be random and evenly distributed • the robots must travel outside their areas to complete the forage task (i.e., to deliver their payload). • A compromise is to hard−code specific behavioral rules into the robots that minimize their collisions and attempt to keep them distributed.
Foraging – Implicit Distribution • Consider robots with omni−directional beacons which are detectable from other nearby robots: • robots avoid moving towards nearby beacons • intuitively, robots should remain separated/distributed When other robot detected within sensor range, robot moves in opposite direction. With multiple beacons, either move away in combined vector direction or away from strongest signal. Although robots may still re−encounter other robots during their movements, in general they remain distributed.
Foraging – Comparison • A comparison of these schemes shows that: • for evenly spread forage items there is no significant advantage of either scheme in terms of forage completion time and the simple random movement seems to do well. • for clustered forage items the fixed area scheme performs poorly with few robots and the repel scheme performs better Repel scheme favorable since performs well AND minimizes robot contact.
Foraging – Improvement • A more significant improvement can be made if something is known about the forage items (e.g., they are clustered). • can “signal” other robots when item is encountered • leave signal on until: - fixed amount of time elapses - other robots come nearby • can either wait stationary or continue moving Robot turns on beacon when item is found. Robots within beacon’s range will travel toward nearest beacon. Robots outside of beacon’s range will continue moving randomly.
Following / Swarming / Flocking / Schooling • Natural flocks consist of two balanced, opposing behaviors: • Desire to stay close to flock • Desire to avoid collisions with flock • Why desire to stay close to flock? • In natural systems: • Protection from predators • Statistically improving survival of gene pool from predator attacks • Profit from a larger effective search pattern for food • Advantages for social and mating activities
How do formations work? Separation: steer to avoid crowding local flockmates Alignment: steer towards average heading of local flockmates Cohesion: steer to move toward the average position of local flockmates
Multi-Robot Communication Taxonomy • Communication range: • None • Near • Infinite • Communication topology: • Broadcast • Addressed • Tree • Graph • Communication bandwidth • High (i.e., communication is essentially “free”) • Motion-related (i.e., motion and communication costs are about the same) • Low (i.e., communication costs are very high • Zero (i.e., no communication is available)
Explicit Communication • Defined as those actions that have the express goal of transferring information from one robot to another • Usually involves: • Intermittent requests • Status information • Updates of sensory or model information • Need to determine: • What to communicate • When to communicate • How to communicate • To whom to communicate • Communications medium has significant impact • Range • Bandwidth • Rate of failure “Help, I’m stuck”
Implicit Communication • Defined as communication “through the world” • Two primary types: • Robot senses aspect of world that is a side-effect of another’s actions • Robot senses another’s actions 2. Awaiting truck knows it is OK to move into position 1. Truck leaves with full load
Three Key Considerations in Multi-Robot Communication • Is communication needed at all? • Over what range should communication be permitted? • What should the information content be?
Is Communication Needed At All? • Keep in mind: • Communication is not free, and can be unreliable • In hostile environments, electronic countermeasures may be in effect • Major roles of communication: • Synchronization of action: ensuring coordination in task ordering • Information exchange: sharing different information gained from different perspectives • Negotiations: who does what? • Many studies have shown: • Significantly higher group performance using communication • However, communication does not always need to be explicit
Over What Range Should Communication Be Permitted? • Tacit assumption: wider range is better But, not necessarily the case Studies have shown: higher communication range can lead to decreased societal performance • One approach for balancing communication range and cost • Probabilistic approach that minimizes communication delay time between robots • Balance out communication flow (input, processing capacity, and output) to obtain optimal range
What Should the Information Content Be? • Research studies have shown: • Explicit communication improves performance significantly in tasks involving little implicit communication • Communication is not essential in tasks that include implicit communication • More complex communication strategies (e.g., goals) often offer little benefit over basic (state) information “display” behavior is a rich communication method
In summary….A Good Multi-robot System Is: • Robust: no single point of failure • Optimized, even under dynamic conditions • Quick to respond to changes • Able to deal with imperfect communication • Able to allocate limited resources • Heterogeneous and able to make use of different robot skills
The Coordination Spectrum Loosely-Coordinated Tightly Coordinated • Decomposable into subtasks • Independent execution • Minimum interaction • Task decomposition and allocation strategies. • Tasks not decomposable • Coordinated execution • Significant Interaction
Basic Approaches • Centralized • Attempting optimal plans • Distributed • Every man for himself • Market-based
Centralized Attempting optimal plans Distributed Every man for himself Centralized Allocation Emergent Fully Centralized Intentional Hybrid Reactive Market Based Behavior- Based Taxonomy of Approaches
Fully Centralized • Single agent “leader“ plans for entire team • Robot team treated as a single “system” with many degrees of freedom • Leader plans optimal actions for group • Group members send information to leader and carry out actions • Potential to be optimal • Implicitly encodes coordination • Usually computationally intractible • Single point of failure • Slow to respond to changes
Centralized Methods: Pros • Leader can take all relevant information into account • In theory, coordination can be perfect: • Optimal plans possible!
Centralized Methods: Cons • Computationally hard • Intractable for more than a few robots • Makes unrealistic assumptions: • All relevant info can be transmitted to leader • This info doesn’t change during plan construction • Result: response sluggish or inaccurate • Vulnerable to malfunction of leader • Heavy communication load
Centralized Allocation • Single agent assigns tasks to teammates • Teammates complete tasks individually • Execution is distributed • Allocation can be optimal • Still computationally expensive • Still has single point of failure
Distributed Approaches • Planning responsibility spread over team • Each robot basically independent • Robots use locally observable information to make their plans
Distributed Methods: Pros • Fast response to dynamic conditions • Little or no communication required • Little computation required • Smooth response to environmental changes • Very robust • No single point of failure
Distributed Methods: Cons • Not all problems can be decomposed well • Plans based only on local information • Result: solutions are often highly sub-optimal