Download
1 / 37
380 likes | 880 Views
Movimiento en un Plano Mov. Circular uniforme. Autores Ignacio Cruz Encinas Mario Enrique Álvarez Ramos Saúl Robles García Roberto Pedro Duarte Zamorano Ezequiel Rodríguez Jáuregui Rogelio Gámez Corrales UNIVERSIDAD DE SONORA Departamento de Física. MOVIMIENTO CIRCULAR UNIFORME.

E N D
Movimiento en un PlanoMov. Circular uniforme Autores Ignacio Cruz EncinasMario Enrique Álvarez RamosSaúl Robles GarcíaRoberto Pedro Duarte ZamoranoEzequiel Rodríguez Jáuregui Rogelio Gámez Corrales UNIVERSIDAD DE SONORA Departamento de Física
MOVIMIENTO CIRCULAR UNIFORME • Analizaremos ahora el otro ejemplo de un movimiento en un plano, siendo éste el circular uniforme. De igual forma que en los movimientos anteriores, nuestro problema es realizar una descripción completa de tal movimiento, para introducirnos en él supongamos el siguiente ejemplo: • Describir el movimiento de una rueda de automóvil se encuentra girando en la misma posición. Suponga que se le han hecho unas marcas localizadas en la parte interior del eje de rotación, en los tornillos, en la parte interior del rin, en la parte exterior del mismo, así como en la parte media y en la exterior del hule de la llanta. Dichas marcas las localizamos a partir del centro de rotación mediante los vectores de posición r1 , r2, ,r3, r4 y r5.
y + r5 r4 Δr5 r3 Δr4 r2 r4 r5 r1 r2 r3 x + Movimiento circular Al girar la llanta, las marcas cambiarán de posición, pero tales cambios que se representan mediante Dr son diferentes para cada marca, de tal forma que: Dr5>Dr4>Dr3>Dr2>Dr1
Movimiento circular Es decir, en el mismo intervalo de tiempo las marcas recorrerán distancias diferentes. Al existir un cambio de posición en un intervalo de tiempo, tenemos asociada una velocidad media dada por: vm = Dr⁄Dt cuya magnitud es: vm =│ vm │ = │ Dr⁄Dt │= (1 ⁄Dt )(│Dr│) su dirección es la misma que la del desplazamiento, la cual se obtiene uniendo la posición inicial con la final (es la misma dirección y sentido para todos los desplazamientos). Sin embargo, como los cambios de posición son diferentes para los mismos intervalos de tiempo, tenemos que las magnitudes: vm5 > vm4 > vm3 > vm2 > vm1
Movimiento circular Consecuentemente los vectores velocidad media también lo serán vm5≠vm4≠vm3≠vm2≠vm1 (Para que dos o más vectores sean iguales deben de tener la misma magnitud, misma unidad, misma dirección y sentido, si alguno de estos parámetros cambia, los vectores son diferentes). por lo tanto, cada partícula que se mueva en una trayectoria circular de radio r tendrá su propia ecuación de movimiento, es decir, si tenemos n partículas moviéndose simultáneamente, tendremos n ecuaciones, lo cual complica la descripción del movimiento. Para salvar dicha dificultad, se requiere de un nuevo concepto bajo el cual se pueda hacer la descripción del movimiento de las n partículas con una sola ecuación. Dicho concepto es el de velocidad angular y para definirla, necesitamos conocer lo que son las cantidades angulares y la relación que estas guardan con respecto a las cantidades lineales o tangenciales que hemos venido manejando. Para tal relación, se requiere definir en primer lugar lo que es el ángulo y la forma común de medirlo, lo cual abordaremos a continuación:
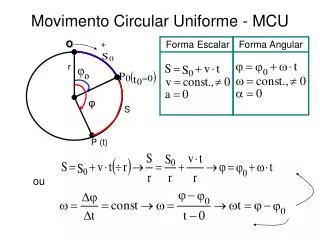
recta R S q v recta R Ángulo El ángulo formado entre dos rectas que se unen en un punto llamado vértice se define como el cociente entre el arco de circunferencia y el radio del círculo. Para representar simbólicamente a los ángulos, generalmente se utilizan las letras del alfabeto griego, a (alfa); b (beta); g (gama); q (teta); f (fi), etc. Rradio de la circunferencia S arco de circunferencia q ángulo v vértice o eje de rotación q = S⁄ R
Ángulo • La forma común de medir ángulos es en sentido contrario a las manecillas del reloj. • Como S se mide en metros, lo mismo que R, el ángulo es una cantidad adimensional, es decir, no tiene unidades, sin embargo, para saber de que cantidad estamos hablando se le da el nombre de radianes ( rad), grados ( 0 ), o revoluciones ( rev ). • Un radián es cuando la longitud del arco de circunferencia es igual a la longitud del radio (s = R ). • Para encontrar la equivalencia entre grados y radianes, sabemos que un circulo tiene 3600, lo cual es una revolución completa, así mismo, tenemos que 3600 representan la longitud el perímetro de la circunferencia (2pR), luego entonces:
Ángulo, radianes y revolución q= 3600 = S ⁄ R = 2pR ⁄ R = 2p radianes = 1 revolución Expresado de otra forma, dividimos el perímetro de la circunferencia en 360 partes iguales para obtener la equivalencia de un grado en radianes 10 = S ⁄ R = (2pR ⁄ 360) ⁄ R = 2p ⁄360 = p ⁄180 = 3.1416 ⁄ 180 10 = 0.01745 rad. 3600 = 1 rev. Aplicando la regla de tres simple, se encuentra que: 1 rad = 57.30
Velocidad Angular Media Ya que tenemos la forma de medir los ángulos, analicemos nuevamente el movimiento de n partículas que se mueven en trayectorias circulares de diferentes radios, buscando generalidades para todas ellas. Para los dos cuerpos, el ángulo barrido (Dq ) es el mismo, así como el intervalo de tiempo ( Dt) R D sR r D sr D q r R
Velocidad Angular Media vm = DS ⁄Dt De la definición de ángulo Dq = DS⁄ R despejamosDS DS = R D q y sustituimos en la ecuación de velocidad media vm = R (Dq ⁄ Dt) El cociente de ángulo barrido entre intervalo de tiempo, es el mismo para cualquier partícula que se mueva en una trayectoria circular, la velocidad lineal o tangencial (v) dependerá de la distancia de la partícula al centro de rotación. A dicho cociente, se le denomina velocidad angular media representándose con la letra griega omega(w).
Velocidad Angular Media Velocidad Angular mediawm=Dq⁄Dt sus unidades son: rad ⁄ s rev ⁄ s grados ⁄ s Para obtener la velocidad angular instantánea, se procede de igual forma que para la velocidad tangencial instantánea, es decir, tomando el limite cuando el intervalo de tiempo tiende a cero, lo cual expresado en símbolos es: La relación entre la velocidad lineal y la velocidad angular es: v = wr
Velocidad Angular Media La velocidad es directamente proporcional a la velocidad angular y a la distancia al eje de rotación. Como la velocidad angular es una constante para un sistema de partículas, la velocidad lineal dependerá de la distancia de la partícula al eje de rotación, entre mas alejada se encuentre, mayor velocidad tendrá. La ecuación de movimiento en cantidades angulares para una partícula que se mueve en una trayectoria circular, se encuentra despejando qde la definición de velocidad angular: q = q0 + w ( t – t0 )
Frecuencia y periodo • Cuando se trabaja con movimientos repetitivos como lo es un cuerpo moviéndose en trayectoria circular, existen dos conceptos útiles de introducir, siendo estos: la frecuencia y el periodo. Cada uno de ellos se define como: Frecuencia.- El número de vueltas por unidad de tiempo (se representa mediante la letra griega "nu"). cuyas unidades son recíprocos de segundo o s-1 Período.- El tiempo que tarda el cuerpo en dar una vuelta (o revolución) completa (se representa mediante la letra griega "tao" ). t = t Cuando el número de vueltas es uno, entonces:
Velocidad lineal y angular Las velocidades lineales y angulares se expresan mediante los parámetros anteriores al considerar una vuelta completa, donde la distancia recorrida será igual al perímetro de la circunferencia. v = Ds/Dt = 2pr/t y como el tiempo es simplemente "tao“ v = 2pr/t además, como la frecuencia es el inverso del período: v = 2pr(1/t) por lo que, v = 2prn Comparando las relaciones anteriores con la expresión: v = w r tenemos que: w= 2pn = 2p/t escribiendo todas las relaciones se tiene que: v = wr = 2pr/t = 2prn
v3 v2 v1 R v4 v5 v8 v6 v7 Aceleración Centrípeta o Radial Analicemos nuevamente el movimiento de una partícula que se mueve en una trayectoria circular de radio r. Como ya se vio en el movimiento en el plano, la velocidad de la partícula será siempre tangente a la trayectoria que ésta siga (de ahí que reciba el nombre de velocidad lineal o tangencial), además recordemos que la velocidad es un vector que posee magnitud, unidad, dirección y sentido. • Empezaremos por el caso mas sencillo en el cual la magnitud de la velocidad es constante. │v1│= │ v2│=│v3│= …… =│v7│=│v8│ Pero: v1 ≠ v2≠ v3≠ …… ≠ v7≠ v8 Porque tienen diferente dirección y sentido
Aceleración Centrípeta o Radial Puesto que los vectores velocidad son diferentes, luego entonces tendremos una diferencia de vectores dada por: Dv= v2 – v1 Dv= v3 – v2 Dv= v4 – v3 Dv= v5 – v4 etc. los cuales se pueden expresar como una suma, al sumar al primer vector, el negativo del segundo vector, es decir: Dv= v2 + (– v1) veámoslo gráficamente:
v3 v2 -v1 Dv23 -v2 Dv12 v1 v4 Dv34 -v8 -v3 Dv45 Dv81 R v5 v8 -v4 v6 v7 Aceleración Centrípeta o Radial Como se puede apreciar, todos los vectores cambios de velocidad son diferentes, pero tienen algo en común: están dirigidos hacia adentro del círculo y tienen la misma magnitud.
Aceleración Centrípeta o Radial Dado que los cambios de velocidad son diferentes, consecuentemente tendremos una aceleración dada por: a = Dv / Dt que como ya sabemos, es un vector con: magnitud, unidad, dirección y sentido. Para precisar correctamente tanto su dirección como sentido así como su magnitud, analicemos de nuevo la figura manteniendo aún constante la magnitud de la velocidad pero considerando un intervalo de tiempoDt mas pequeño y consecuentemente un .
v2 v1 -v1 D v v3 -v3 D v v4 Aceleración Centrípeta o Radial Al hacer la diferencia de vectores Dv (por ej. v2 – v1), en la figura se aprecia que ésta apunta en dirección radial y hacia el centro de rotación independientemente del lugar en donde la queramos medir (por ej. v4 – v3) . Además como la dirección y el sentido del vector aceleración es el mismo que del vector cambio de velocidad: la aceleración es radial y dirigida hacia el centro de rotación, de ahí que reciba el nombre de aceleración radial o centrípeta. Dv cuando Dt → 0
c v2 v1 -v1 D v d b R DS e a R Aceleración Centrípeta o Radial Cualitativamente, también se aprecia que la diferencia de vectores tienen la misma magnitud. Para determinarla cuantitativamente, debemos tomar un Dtpróximo a cero, de tal manera que los puntos a y b se encuentren tan cercanos uno del otro que la parte curva del circulo entre dichos puntos pueda considerarse como una recta.
c v2 v1 -v1 D v d b R DS e a R Aceleración Centrípeta o Radial De ésta forma, tendremos que DSserá una línea recta entre el punto ay el punto b, formándose los triángulos aeb y bcd, que tienen las siguientes características: triángulo aebtriángulo bcd Dos lados iguales Rv Uno desigual DSDv De la semejanza de triángulos tenemos que: dos o más triángulos son semejantes si tienen dos lados iguales y uno desigual. Dicho en otras palabras, el lado desigual (DS) del triángulo aeb lo es al lado igual (R) como el lado desigual (Dv) del triángulo bcd lo es al lado igual (v).
Magnitud de la Aceleración Centrípeta Traducido en lenguaje simbólico: despejandoDvy dividiendo entre el intervalo de tiempoDtque tardó el cuerpo en ir del puntoaal puntob donde: y sustituyendo lo anterior
Aceleración Centrípeta o Radial Siendo a= │a│ lamagnitudde la aceleración del cuerpo, v= │v│ lamagnitudde la velocidad del cuerpo y Rel radio de la trayectoria circular Como la aceleración es radial y dirigida hacia el centro de rotación, se le agrega el subíndice r para diferenciarla de la aceleración lineal o tangencial. De ésta forma:
Aceleración Centrípeta o Radial Para expresarla en forma vectorial, se define el vector unitarioque es un vector cuya magnitud es la unidad, su dirección es a lo largo del radio y su sentido es saliendo del centro y dirigiéndose hacia la posición de la partícula. Se puede decir que constantemente está cambiando su dirección (con respecto a un sistema de coordenadas x, y), ya que sigue a la partícula en toda su trayectoria circular. Además, como la aceleración apunta en sentido contrario al vector unitario es decir, en dirección entonces: La magnitud de la aceleración, expresada en función de la velocidad angular, la frecuencia y el período es:
Movimiento Circular no Uniforme Todos los movimientos analizados hasta el momento, tales como el rectilíneo uniforme, el uniformemente acelerado, el parabólico y el circular uniforme, son de los movimientos mas sencillos que se producen en la naturaleza y se han tratado de una forma aislada. Sin embargo, en la vida cotidiana lo que se observa en realidad es una combinación de ellos como por ejemplo: Un automóvil que se desplaza con velocidad constante sobre una carretera horizontal y que tiene una curva en el camino. El conductor, al observar la curva disminuye su velocidad pasando de un movimiento rectilíneo uniforme a uno uniformemente acelerado (desacelerado), ya que empieza a frenar para poder entrar a la curva con menor velocidad y no derrapar en el pavimento. Al entrar a la curva, dependiendo de la velocidad que lleve en ese momento, puede agarrarla con esa misma velocidad, pasando a un movimiento circular uniforme. Aproximadamente después de la mitad de la curva, el conductor vuelve a acelerar, pasando a un movimiento circular no uniforme, continuando acelerando al salir de la curva hasta alcanzar nuevamente la velocidad de crucero (velocidad de viaje). Esto lo ilustramos en la siguiente figura:
Movimiento Circular no Uniforme rectilíneo rectilíneo uniformemente uniforme acelerado circular uniforme circular no R uniforme rectilíneo uniformemente acelerado rectilíneo uniforme
v2 c -v1 v1 v2 D v -v1 v1 D v d b R DS e a R Movimiento Circular no Uniforme Analicemos el movimiento circular no uniforme en el cual tanto la magnitud de la velocidad así como la dirección y sentido están variando.
Movimiento Circular no Uniforme Eje tangente c v2 -v1 v1 d D vt Eje radial D v b R D vr e DS a R
Movimiento Circular no Uniforme Nuevamente, al hacer la diferencia de vectores, encontramos un cambio en la velocidad, pero a diferencia del movimiento anterior, éste ya no apunta en dirección radial. Pero como es un vector, la podemos descomponer en dos componentes rectangulares, una radial y otra tangencial. Dv = Dvr + Dvt y la aceleración del cuerpo será: donde el término: es la aceleración radial o centrípeta que encontramos en la sección anterior, y es la aceleración lineal del movimiento rectilíneo uniformemente acelerado, la cual viene expresada por:
Movimiento Circular no Uniforme Como es un movimiento circular, la velocidad lineal se expresa en cantidades angulares como: v =wr sustituyendo tenemos que: además: que es conocida con el nombre de aceleración angular media ( am)
Movimiento Circular no Uniforme Tomando el límite cuando el intervalo de tiempo tiende a cero: y cuando la aceleración angular media es una constante, ésta será también igual a la aceleración en cualquier instante de tiempo, es decir: de donde: Por lo tanto, la aceleración del cuerpo que se mueve en una trayectoria circular con velocidad variable y aceleración angular constante es:
A B B q q q s s r r r B A A s = r q Cantidades Tangenciales y Angulares Aunque ya tenemos la relación entre ambas cantidades, éstas se obtuvieron suponiendo que la rueda se encontraba girando en la misma posición, ahora combinaremos dos movimientos simultáneos: el lineal y el rotacional. Un ejemplo de ello es cuando un carrete desenrolla una cuerda o una rueda se desliza por el suelo, lo cual se ilustra en la siguiente figura:
Cantidades Tangenciales y Angulares En dado caso de que el carrete rotara en la misma posición, para que el punto B ocupe la posición del punto A, debe de girar un ángulo q el cual por definición viene expresado como: q = s/r en donde por definición de ángulo, q debe de medirse en radianes. Al arco de circunferencia también se le llama distancia tangencial por ser medido tangencialmente al borde del carrete, y viene expresado por: s = r q Como tenemos dos movimientos simultáneos, el rotacional al girar y el lineal al avanzar el carrete, al observar la figura anterior, se tiene que la distancia lineal que recorre la rueda al girar un arco de circunferencia s = r q, es igual a la distancia tangencial que recorre el borde. Lo anterior nos permite relacionar el movimiento lineal con el rotacional.
Cantidades Tangenciales y Angulares s Más aún, si se observa la siguiente ilustración en que una rueda gira con su eje de rotación en la misma posición levantando un cuerpo, se ve que existe una relación similar en la forma en que la cuerda se enrolla en su borde. A medida que un punto del borde recorre una distancia tangencial s al girar, en el borde se enrolla una longitud sde la cuerda. q r r s = r q s
s q r r s = r q s Cantidades Tangenciales y Angulares Más aún, si se observa la siguiente ilustración en que una rueda gira con su eje de rotación en la misma posición levantando un cuerpo, se ve que existe una relación similar en la forma en que la cuerda se enrolla en su borde. A medida que un punto del borde recorre una distancia tangencial s al girar, en el borde se enrolla una longitud sde la cuerda.