Download
1 / 22
230 likes | 267 Views
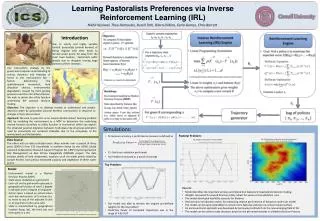
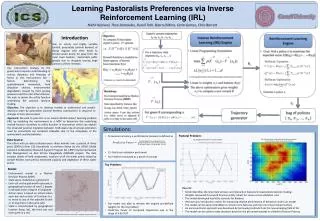
This paper explores Active Learning for Reward Estimation in Inverse Reinforcement Learning, a method that enables learning from demonstration without expert knowledge or parameter tuning. It addresses the challenges of ill-defined problems in IRL by actively querying the demonstrator. The outline covers motivation, background, active IRL, results, and conclusions. Markov Decision Processes are introduced to explain state-action dynamics and rewards. The text discusses the transition from rewards to policies, IRL, and probabilistic views of learning algorithms. It emphasizes the Gradient-based and Active Learning in IRL methods to improve policy estimation. Results in applications like Maximum of a Function, Puddle World, and General Grid World showcase the effectiveness of active learning strategies in reducing the number of demonstrated samples and translating reward uncertainty into policy uncertainty. The conclusions emphasize the benefits of active sampling in IRL for improving learning efficiency.

E N D
Active Learning for Reward Estimation in Inverse Reinforcement Learning M. Lopes (ISR)Francisco Melo (INESC-ID)L. Montesano (ISR)
Learning from Demonstration • Natural/intuitive • Does not require expert knowledge of the system • Does not require tuning of parameters • ... 2
The RL paradigm: The IRL paradigm: EXPERT WORLD Demo (Policy) Reward Agent Agent Task description (reward) Policy Inverse Reinforcement Learning 3
However... • IRL is an ill-defined problem: • One reward multiple policies • One policy multiple rewards • Complete demonstrations often impractical By actively querying the demonstrator, ... • The agent gains the ability to choose “best” situations to be demonstrated • Less extensive demonstrations are required 4
Outline • Motivation • Background • Active IRL • Results • Conclusions 5
Markov Decision Processes A Markov decision process is a tuple (X, A, P, r, γ) • Set of possible states of the world: X = {1, ..., |X|} • Set of possible actions of the agent: A = {1, ..., |A|} • State evolves according to probabilities P[Xt + 1 = y | Xt = x, At = a] = Pa(x, y) • Reward r defines the task of the agent 6
Example • States: 1, ..., 20, I, T, G • Actions: Up, down, left, right • Transition probabilities: Probability of moving between states • Reward: “Desirability” of each state • Goal: • Get the cheese • Avoid the trap 7
From Rewards to Policies • A policy defines the way the agent chooses actions: P[At = a | Xt = x] = π(x, a) • The goal of the agent is to determine the policy that maximizes the total (expected) reward: V(x) = Eπ[∑tγt rt | X0 = x] • The value for the optimal policy can be computed using DP: V *(x) = r(x) + γ maxaEa[V *(y)] Q*(x, a) = r(x) + γEa[V *(y)] 8
Inverse Reinforcement Learning • Inverse reinforcement learning computes r given π • In general • Many rewards yield the same policy • A reward may have many optimal policies • Example: When r(x) = 0, all policies are optimal • Given a policy π, IRL computes r by “inverting” Bellman equation 9
Probabilistic View of IRL • Suppose now that agent is given a demonstration: D = {(x1, a1), ..., (xn, an)} • The teacher is not perfect (sometimes makes mistakes) π’(x, a) = e n Q(x,a) • Likelihood of observed demo: L(D) = ∏iπ’(xi, ai) 10
Gradient-based IRL (side note...) • We compute the maximum-likelihood estimate for r given the demonstration D • We use a gradient ascent algorithm: rt + 1 = rt + r L(D) • Upon convergence, the obtained reward maximizes the likelihood of the demonstration 11
Active Learning in IRL • Measure uncertainty in policy estimation • Use uncertainty information to choose “best” states for demonstration So what else is new? • In IRL, samples are “propagated” to reward • Uncertainty is measured in terms of reward • Uncertainty must be propagated to policy 12
The Algorithm General Active IRL Algorithm Require: Initial demonstration D 1: Estimate P[π | D] using MC 2: for all xX 3: Compute H(x) 4: endfor 5: Query action for x* = argmaxxH(x) 6: Add new sample to D 13
The Selection Criterion • Distribution P[r | D] induces a distribution on • Use MC to approximate P[r | D] • For each (x, a), P[r | D] induces a distribution on π(x, a): μxa(p) = P[π(x, a) = p | D] • Compute per state average entropy: H(x) = 1/|A|∑aH(μxa) Compute entropy H(μxa) a1 a2a3a4 ... aN 14
Results I. Maximum of a Function • Agent moves in cells in the real line [-1; 1] • Two actions available (move left, move right) • Parameterization of reward function r(x) = θ1 (x – θ2) (target: θ1 = –1, θ2 = 0.15) • Initial demonstration: actions at the borders of environment: D = {(-1, ar), (-0.9, ar), (-0.8, ar), (0.8, al), (0.9, al), (1, al)} 15
Results I. Maximum of a Function Iteration 5 Iteration 1 Iteration 2 16
Results II. Puddle World • Agent moves in (continuous) unit square • Four actions available (N, S, E, W) • Must reach goal area and avoid puddle zone • Parameterized reward: r(x) = rg exp((x – μg)2 / α) + rp exp((x – μp)2 / α) 17
Results II. Puddle World • Current estimates (*), MC samples (.), demonstration (o) • Each iteration allows 10 queries Iteration 1 Iteration 2 Iteration 3 18
Results III. General Grid World • General grid world (MM grid) • Four actions available (N, S, E, W) • Parameterized reward (goal state) • For large state-spaces, MC is approximated using gradient ascent + local sampling 19
Results III. General Grid World • General grid world (MM grid) • Four actions available (N, S, E, W) • General reward (real-valued vector) • For large state-spaces, MC is approximated using gradient ascent + local sampling 20
Conclusions • Experimental results show active sampling in IRL can help decrease number of demonstrated samples • Active sampling in IRL translates reward uncertainty into policy uncertainty • Prior knowledge (about reward parameterization) impacts usefulness of active IRL • Experimental results indicate that active is not worse than random • We’re currently studying theoretical properties of Active IRL 21
Thank you. 22