Download
1 / 15
• 150 likes • 304 Views
The Tendril SURE 2006. Matthew Bennink Advisor: Dr. Ian Walker. Overview. Intro. to Robotics NASA’s Tendril Robot Problems My Work Results Discussion Conclusions. Intro. To Robotics. Robotics – the science and technology of robots, their design, manufacture, and application.

E N D
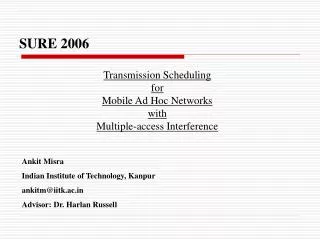
The TendrilSURE 2006 Matthew Bennink Advisor: Dr. Ian Walker
Overview • Intro. to Robotics • NASA’s Tendril Robot • Problems • My Work • Results • Discussion • Conclusions
Intro. To Robotics • Robotics – the science and technology of robots, their design, manufacture, and application. • Kinematics – relationship between joint (internal) variables and task (external) variables, at position andvelocity levels.
Tendril Inspiration • Biology • Medical Equipment
NASA’s Tendril • Length : 1m • Diameter : 1cm • 8 External Motors
NASA’s Early Kinematics • Tip Joint • M3 = Pitch • M4 = -Yaw • Upper Joint • M1 = .7 Yaw - .7 Pitch • M2 = .7 Yaw + .7 Pitch
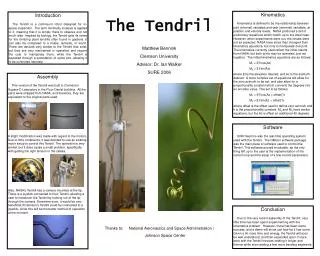
NASA’s Kinematics • Tip Joint • M3 = Elev cos(Az) • M4 = Elev sin(Az) Az = Az + Azoff Elev = (1 + Kboost) Elev
NASA’s Results • Tip can be reliably pointed +/- 30 deg • Upper joint is commanded directly • Pass through extend and rotate commands.
Problems • Kinematics • Gravity • Coupling • Twist • Size
My Work • Visit to Johnson Space Center • Assembly of Clemson’s Tendril • Simple Control • Tendril in Motion
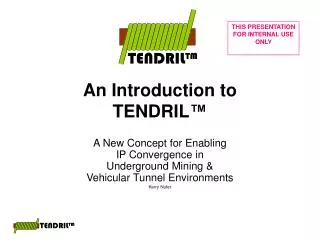
23 threaded links and springs. Teflon tubing Spectra fishing line Assembly
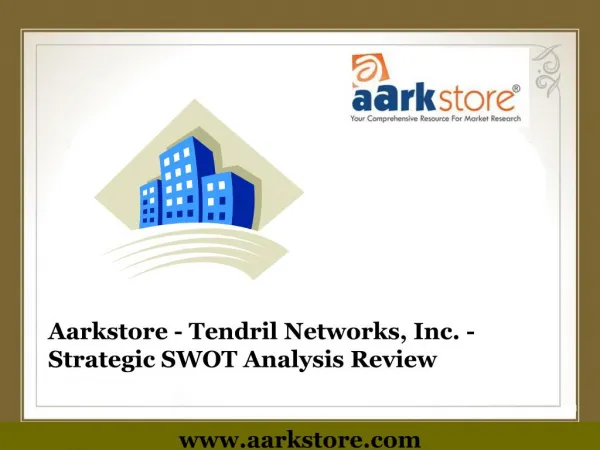
Conclusions • Hardware • Some problems as a result of springs. • Tension with tendons is also problem. • Software • QMotor is sufficient. • Algorithms are easily implemented. • We have a Tendril.
Acknowledgements • Dr. Ian Walker • Dr Noneaker & Dr. Xu • Matt, Martha, David, & Vilas