Download
1 / 17
170 likes | 302 Views
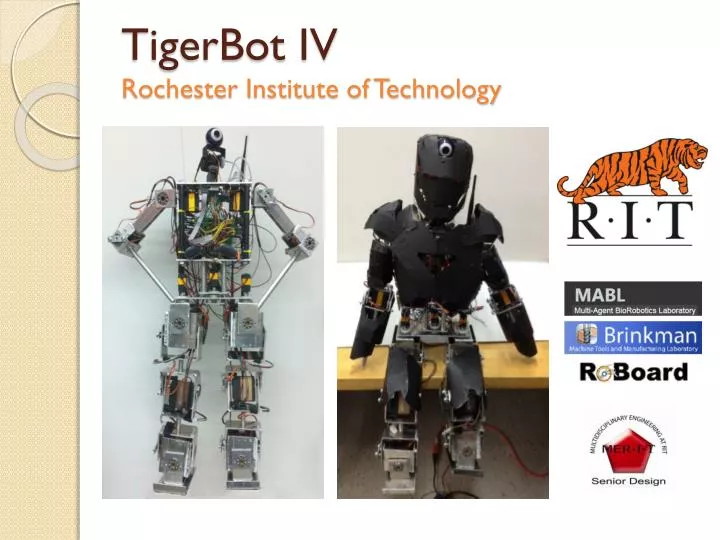
TigerBot IV Rochester Institute of Technology. Group Members. Mike Lew (ISE) Dan Wiatroski (ME) Tom Whitmore (ME) Geoff Herman (ME) Sean Lillis (CE) Brian Stevenson (EE) James O’Donoghue (CE) Mohammad Arefin (EE) Sasha Yevstifeev (EE). Objectives.

E N D
Group Members • Mike Lew (ISE) • Dan Wiatroski (ME) • Tom Whitmore (ME) • Geoff Herman (ME) • Sean Lillis (CE) • Brian Stevenson (EE) • James O’Donoghue (CE) • Mohammad Arefin (EE) • Sasha Yevstifeev (EE)
Objectives • Balance and walk with human gait • Recover to upright position after a fall • Autonomous, untethered operation for up to 30 minutes • Support 125% of total robot weight • Obstacle avoidance • Voice activated • Able to withstand a fall • Designed, built, and debugged – currently 20 weeks • Budget: $2500 (Actual Budget: ~$3100)
TigerBot Family TigerBot TigerBot 2 TigerBot 3
Human Theme Head Design Front Chest Back Plate Shell theme “Ironman”, enables easy definition of future shell enclosures Designed using Pepakura software Made from 0.016” aluminum to be as light as possible Component Layout
System Design • 23 Rotational Degrees of Freedom (4 per arm, 6 per leg, 1 in torso, 2 in head) • Full load bearing joint design at every axis of rotation, allowing completely free and unrestricted servo rotation • Servo motors take no structural loads • Low center of gravity ~2 inches below pelvis plate (avoids falling, assists recovery) • Higher torque servos (legs) and lower torque servos (upper body)
Structural Concept • Lighter weight • 18.5 lbs • Improved joint performance • Future expandability with rod design
Structural Design Knee - Exploded View Elbow – Close Up
Integrated Controls Roboard RB-100 CPU 9-Axis IMU • 32-bit Roboard Vortex86 CPU with 256MB DDR2 RAM and 16GB Class 10 SD Card running Ubuntu • ATmega2560 Arduino with 16 analog input ports • 9-Axis IMU (Accelerometer, Magnetometer, and Gryoscope) • EasyVR Voice Recognition with 26 pre-programmed commands and up to 9 minutes of audio playback EasyVR Voice Recognition
Electrical Design Custom PCB - Powerboard Hall Effect Custom PCB – Current Sensing Power Distribution • Fuse and switches for circuit protection • Low battery indicator • I2C communication bus with up to 4 slaves Current Monitoring • Determine servo strain to determine forces acting on robot • Measure currents drawn by each servo • Capable of sensing current for up to 25 servos • High side and low side current sensing
Results • Current State • Operates autonomously • Responds to multiple commands • Challenges • Time constraint • Manufacturing limitations
Future Recommendations • CE’s to work on coding on previous TigerBot early in MSDII • Relieve end of quarter scramble after mechanical build is completed • Tower layout for electrical boards • As more and more boards/components are introduced, wiring becomes difficult • Individual current shutoff for each servo • More design focus on servo coupling